

- 14
- 372 916
Robotics and ROS Learning
Приєднався 20 січ 2019
Indoor Autonomous Delivery Robot with GUI Interface | ROS2 | QT | Navigation2 Stack
In this project I have developed a GUI interface for the mobile robot so that it becomes user friendly to operate he robot. All the ros2 node are activated by the bootup service as soon as the robot is powered ON. The GUI will display automatically on bootup and ready to take commands from the operator. This robot can be used for carrying heavy loads or can be converted to work as serving robot in restaurants or coffee shops.
I have a plan to test this robot in restaurants and coffee shops for real-world applications. If you own a restaurant or coffee shop and are interested in testing this robot, please let me know-I’d love to collaborate! You can write to me on my gmail id: rosroboticslearning@gmail.com
I have also discussed in the video the way to integrate RVIZ into the gui application. Below is the link to source code, which has core files to integrate Rviz into QT GUI application.
Source code: github.com/bandasaikrishna/qt_gui_ros2
Music track: A Positive Direction by Aylex
Source: freetouse.com/music
Royalty Free Music for Video (Safe)
Music track: Last Summer by Aylex
Source: freetouse.com/music
Free Background Music for Video
I have a plan to test this robot in restaurants and coffee shops for real-world applications. If you own a restaurant or coffee shop and are interested in testing this robot, please let me know-I’d love to collaborate! You can write to me on my gmail id: rosroboticslearning@gmail.com
I have also discussed in the video the way to integrate RVIZ into the gui application. Below is the link to source code, which has core files to integrate Rviz into QT GUI application.
Source code: github.com/bandasaikrishna/qt_gui_ros2
Music track: A Positive Direction by Aylex
Source: freetouse.com/music
Royalty Free Music for Video (Safe)
Music track: Last Summer by Aylex
Source: freetouse.com/music
Free Background Music for Video
Переглядів: 2 593
Відео


Navigation2 in ROS2 | Autonomous Mobile Robot | Nav2 | Behavior Trees | Odrive| Diff drive Robot
Переглядів 15 тис.10 місяців тому
This video is about the navigation2 in ros2. We will cover 1. Overview of Navigation2 2. Understanding the concept of Behavior Trees. 3. BT xml flow explanation 4. Point to point navigation Demo on real Hardware 5. Keepout Filter Plugin Demo 6. Speedlimit Filter Plugin Demo. Upgrade Jetson Nano to Ubuntu 20.04: qengineering.eu/install-ubuntu-20.04-on-jetson-nano.html Code to the Project: github...
Autonomous Navigation Mobile Robot Version 2 | ROS | Odrive | BLDC Motors| Jetson Nano | RPLidar
Переглядів 24 тис.2 роки тому
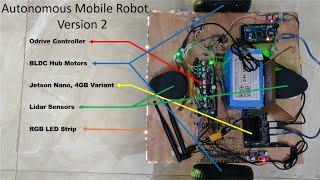
This is the my new autonomous mobile robot version 2. This AMR got few updates compared to version 1. If you havent watched my previous video on Autonomous Mobile robot, click on the i button to watch it now. The Major update is the motors. These are BLDC HUB motors with hall encoders. This BLDC motrors are controlled using odrive controller. The odometry is very accurate with the bldc motors a...

Sensor Fusion in Mobile Autonomous Robot | ROS | IMU+Wheel Odometry | Kalman Fliter | Jetson Nano
Переглядів 34 тис.3 роки тому
In this video we will see Sensor fusion on mobile robots using robot_localiztion package. First we will find out the need for sensor fusion, then we will see how to use robot_localization package for sensor fusion and finally will see the comparison of odometry data with and without sensor fusion. We will fuse IMU data with wheel odometry data to get more accurate robot location. I have used MP...
Roll Pitch Yaw from IMU Sensor and Vizualizing it in RVIZ ROS | MPU6050 | Jetson Nano | I2C
Переглядів 23 тис.3 роки тому
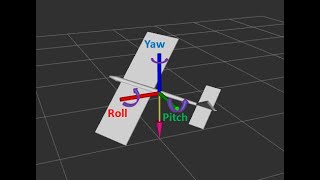
In this video we will see how to get orientation quaternions from a IMU sensor-MPU6050. I've used Jetson's I2C bus to directly get the IMU data without using Arduino or any other micro-controller. I have also made a 3D plane model for better visualisation of the rotations in RVIZ. This Project source code: github.com/bandasaikrishna/orientations_from_IMU_MPU_6050 mpu_6050_driver package: github...

Object detection and 3D pose estimation from Point cloud using Realsense depth camera | ROS | PCL
Переглядів 24 тис.3 роки тому
In this project I will use find_object_2d package for object detection and 3D pose estimation. In this project, Intel Realsense D415 is used for rgb-d point cloud. I have explained the working of find_object_2d and its implementation. I'll try to find more robust ways for object detection and 3D pose estimation in future. Stay tuned to my channel. Website: www.rosroboticslearning.com/ Source co...

Autonomous Navigation Mobile Robot using ROS | Jetson Nano | RPLidar | Differential Drive Kinematics
Переглядів 146 тис.4 роки тому
In this video I have shown the working of Autonomous mobile navigation robot using ROS navigation stack. I have 3D printed this robot. This video covers the concepts of ROS navigation stack, kinematics of differential drive, configuring ROS differential drive controller, mapping using slam_gmapping node, localization using AMCL node and mobile robot in action autonomously going to the goal loca...

3D Printed 6 DOF Arm| ROS MOVEIT | UR3 Arm | Inverse Kinematics | Arduino
Переглядів 10 тис.4 роки тому
This is a 3D printed 6 DOF Arm which is a model of UR3 arm. Thanks to LoboCNC for the 3D design and John Lauer for making a detailed video on printing and assembling this arm. This arm uses i2c protocol for communication between micro controllers. Accel stepper library is used to control stepper motors. 3D Designs : Body: www.thingiverse.com/thing:3327968 Actuators: www.thingiverse.com/thing:32...

Robotic Vegetable Chopper Part 1 | 3D model | 3D Printing
Переглядів 2,8 тис.4 роки тому
I am trying to build a autonomous Robotic vegetable chopper which can be used in day to day life to cut vegetables without human intervention. So for this project I have 3D modelled a chopper design which can cut vegetables when placed under this. I'm 3D printing a 6-DOF arm for this project to place the vegetables under this chopper. In this video I'll show the design and working of the choppe...
Rotary Encoder As Joint Sensors without Interrupt Routine | DC Motor PID Control | Arduino | I2C
Переглядів 2,7 тис.5 років тому
In this video I have shown how to use the rotary encoders without interrupt routines making them independent of micro controller. I have made a circuit which can send the encoder feedback to the controller via i2c. The ICs used in the circuit are PCF8575, D Flip-Flop, 74191, 4093, 4013.Us this circuit and Arduino PID library, I have controlled the speed and position of the DC motor which provid...
Position and Velocity control of a DC motor Using PID | ROS control | rqt_reconfigure| Arduino
Переглядів 28 тис.5 років тому
This videos explains how to control the position and velocity of a DC encoder motor using ros_control package. Show how check the behaviour of controllers using rqt_plot and dynamically change the values of P, I and D terms while the motor is running. Link to source code of this Project: github.com/bandasaikrishna/ros_control_example For more details on ROS_CONTROL package, go through below lin...
Six DOF Robotic Arm performing Pick and Place action using ROS Moveit and OpenCV | Arduino
Переглядів 17 тис.5 років тому
In this video I am going to demonstrate pick and place using 6-DOF spatial arm. I've used move group pick and place pipeline to achieve this. The inverse kinematics solver used for this manipulator is KDL. The object detection is done using OpenCV. Source code: github.com/bandasaikrishna/6-DOF_Manipulator For more stuff on Robotics and ROS: www.rosroboticslearning.com 3-DOF_Manipulator: ua-cam....
Object tracking robot using ROS Moveit and OpenCV | Arduino
Переглядів 13 тис.5 років тому
In this video I will explain how to make a manipulator track a coloured object using OpenCV and ROS Moveit. For better understanding watch my previous video on 3-DOF planar manipulator project. Previous Video Link: ua-cam.com/video/G-XXnPHYhxs/v-deo.html Scripts of this project: github.com/bandasaikrishna/3-DOF_Manipulator/tree/master/three_dof_planar_manipulator/scripts For more stuff on Robot...
Inverse Kinematics and Trajectory Execution of a robot manipulator using ROS Moveit and Arduino.
Переглядів 32 тис.5 років тому
This is a 3-DOF planar manipulator project which uses Moveit, ros_control package, Ikfast plugin, Interactive marker and Arduino to solve inverse kinematics and execute the specified Trajectory. For more details about this project: www.rosroboticslearning.com/3-dof-planar-manipulator Source code: github.com/bandasaikrishna/3-DOF_Manipulator For more stuff on Robotics and ROS: www.rosroboticslea...
bro can u guide me, how to use odrive_ros, i am getting some erros, some of the files missing
you use ros or Ros2?
Ros2
Hello, good morning. I am interested in developing more specialized applications using the Behavior Tree tools in Nav2 and ROS2. However, I am finding very little information on developing custom plugins and actions. Do you know of any repositories or communities where I can find more accurate and detailed information on this topic?
about the Brushless dc motor , ti is has encoder also ?
Yes. These hub motors are BLDC motors and it comes with inbuilt encoder.
@@roboticsandroslearning8232 I understand that it is hall sensor a,b ,c detect rotor position. ??
Can you tell me what motors you are using and where did u get it how many cpr you are getting
These are hub motors, I got it online. Its CPR is 90. roboticsdna.in/product/c/?src=google&kwd=&adgroup={adgroup}&device=m&campaign={campaign}&adgroup={adgroup}&keyword=&matchtype=&gad_source=1&gclid=CjwKCAiA74G9BhAEEiwA8kNfpQePDl0ZSoVrlWHkeibrs1YKors949ARU9bPeAwn9TOmoPDMq0Zf_BoCro0QAvD_BwE
@@roboticsandroslearning8232 This link doesn't work. Can you share more details about the BLDC motors and their controller.
Hello, thank you for the video, it looks amazing. I wanted to ask regarding localization of the robot. Are you using automatic localization based on lidar or are you setting manually the initial pose of the robot? I am trying to do localization in pre-saved map without needing for manual set of initial pose. I tried amcl, slam_toolbox localization, als_ros but no luck in ros2 humble. Could you please explain how you did this (if using automatic localization)?
I am doing manual localization but using a script. The last saved /amc_pose of the robot during robot shutdown is published on /initial_pose topic when the robot bootsup.
bro I'm making such an exact delivery robot and I just stumbled upon your video, I have a few questions if you mind helping me out: 1. I saw your LiDAR is positioned around 4 vertical supports connecting the chassis to the upper layer. Do those supports interfere with the LiDAR's scanning? I presume that's an A1M8, is it powerful enough, or is there some technique you used to get an unobstructed 360 view. 2. For my setup, I will run the GUI on laptop and comm. with Pi (headless) over SSH, should I run the GUI on my laptop or run on the Pi and be accessed remotely? Which is better. 3. What other sensors did you use for the robot other than LiDAR, what IMU type in fact. 4. I struggle to find, if any useful resources, tutorials or videos to integrate Qt (C++) with ROS2. Do you mind sharing any? Your project itself is a gamechanger and has inspired more confidence in me just by watching it, Thanks for your useful and valuable work.
Great work..I am also studying ROS, can I ask how to make the robot stop until the obstacle moves out of the way? thanks <3 <3
I am still trying to make changes in local planner to stop the robot when an obstacle is detected. I will publish when it is completely working.
thank you for the video it inspires me so much
Have you done any filtering for odometry?
No. There is no fusion or filtering of odomerty in this project. The odometry is from wheel encoders only.
@roboticsandroslearning8232 I am understanded . Thank you for answer.
Hi, thanks for sharing. I am sure everybody is searching for gui and android app to control ros2. You are using raspberry pi 4, I have performance problem with it in ros2. Especailly I have planner frequency warning and navigation stops even planner freq setpoint is only 2 hz. How do you solve it?
I did not face any problem with pi 4. Mine is 8 GB version.
are you a graduate student sir
No
@@roboticsandroslearning8232 then like PHD or what is your qualification sir your knowledge is so deep
@@roboticsandroslearning8232 are you PHD or ms student sir your knowledge is so deep
@@KumarKK-e9q stop being cringe bro wtf
@ why ??
perfect bro
Great job
amazing ❤❤
amazing work 🔥
hi just I was just working on the arm that you made earlier with ROS1 could you help me with the ROS2 stack for the same, we were running through some issues, and great to see a video from you!
Thank you. Ros2 nav2 code is shared in my previous video. Below is the link github.com/bandasaikrishna/Nav2_Autonomous_Mobile_Robot.git
Such a wholesome video, kudos!
Great work.. would really love to see the real world applications of this project
does this has obstacle avoidance using lidar ?/
Yes, but I made a custom planner that will make the robot stop until the obstacle moves out of the path
Can you please share the custom planner i am also trying to do this instead of replanning wait there until the obsticle is moved
awesome work brother!
I got it I finding this for long time You impress everyone Thank you so much I appreciate your telent ❤
Hi, These are very cool. We need atleast 4 of them for our hotel and restaurant. Please let me how can we get in touch with you?
Please email me.
hi how to stop nav2 and resume with switch?
Do you mean complete nav2 process or just the current goal ?
How can we pause and resume the current goal
thank you. He has been guiding me.
Very informative 👏🏻
This is my first time see how to use QT! Thank you
Which language used to create gui
C++
Can somebody show me the connection of boost converter , inputs and outputs??
Can you make this project from starting
Do you have a detailed tutorial on how to make this robot?
Is there an electrical wiring diagram for the robot? I'm currently studying this.
Can you publish your source? Tks
how to write urdf for own robot
Follow the urdf tutorials, its easy. docs.ros.org/en/foxy/Tutorials/Intermediate/URDF/Building-a-Visual-Robot-Model-with-URDF-from-Scratch.html
you are a gemmmmmmmmm bro💎
Thanks bro 🙏
your points are very clear. great video
your car looks great. what MCU did you use to control the motor?
I used odrive driver to control the motors from Jetson Nano
Hi Bro, Thank you for the amazing video! I have an issue with my robot, the laser keeps drifting although I have used ekf filter but i think the value of the imu is not filtered by the robot_pose_ekf. can you please help me with that or share me the imu complementary filter package please
Hey man, u got any schematics or 3d models? Good video
It should be somewhere in my laptop
How to control Jetson nano from another computer?
I used vnc viewer
can i get the complete ros workspace
Link to source code is in the description
how to run 6 motors simultaneously using ros2
It depends on the motor driver you are using
Great job. I was going through your GitHub repo, I didn't find any implementation of pushbutton and addressable led in the code. Can you please share the back ground code for both Arduino and ros part. Regards
can you make a video of the hardware side as well. If we are using ros2 navigation stack how it is communicating with the hardware. I do know that we have to write the custom hardware interface but how to move motors according the path planning plugins. I am working on similar project. I was able to connect my robot with Arduino through serial communication but I don't know how to move the motors according the navigation2 path plan.
Since am working with that too but mode roke it is kind tough
Can i get ur information
thank u so much..for info
Thanks for sharing. It tooks my one week to convert it to ros2 humble. Maybe there is software converting automaticaly. One question, in your video 29:38 second, why after running autonomous_nav.launch file not showing map in rviz2? It only shows global map.
I am struggling with the conversion to Humble also. Can you please share your Humble version of the code?
Could you help me about this error: ry:~/ros2_ws$ colcon build --symlink-install Starting >>> agv_proto Starting >>> ros2_control_demo_hardware Starting >>> ros_odrive_msg --- stderr: agv_proto CMake Error at CMakeLists.txt:47 (find_package): By not providing "Findhardware_interface.cmake" in CMAKE_MODULE_PATH this project has asked CMake to find a package configuration file provided by "hardware_interface", but CMake did not find one. Could not find a package configuration file provided by "hardware_interface" with any of the following names: hardware_interfaceConfig.cmake hardware_interface-config.cmake Add the installation prefix of "hardware_interface" to CMAKE_PREFIX_PATH or set "hardware_interface_DIR" to a directory containing one of the above files. If "hardware_interface" provides a separate development package or SDK, be sure it has been installed. --- Failed <<< agv_proto [1.59s, exited with code 1] Aborted <<< ros2_control_demo_hardware [1.56s] Aborted <<< ros_odrive_msg [2.66s] Summary: 0 packages finished [3.89s] 1 package failed: agv_proto 2 packages aborted: ros2_control_demo_hardware ros_odrive_msg 3 packages had stderr output: agv_proto ros2_control_demo_hardware ros_odrive_msg
Thank you very much. Don't you use ROS2_Control?
I did use ros2_control