Rotary Encoder As Joint Sensors without Interrupt Routine | DC Motor PID Control | Arduino | I2C

Вставка
- Опубліковано 10 лис 2019
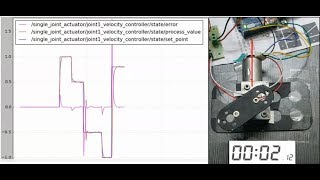
- In this video I have shown how to use the rotary encoders without interrupt routines making them independent of micro controller. I have made a circuit which can send the encoder feedback to the controller via i2c. The ICs used in the circuit are PCF8575, D Flip-Flop, 74191, 4093, 4013.Us this circuit and Arduino PID library, I have controlled the speed and position of the DC motor which provides feedback from a magnetic encoder.
Source code: github.com/bandasaikrishna/us...
Rotary encoder working and Debounce and Direction detection circuit explanation:
• Build A Rotary Encoder...
For More Stuff on Robotics And ROS go through:
www.rosroboticslearning.com








Great Keep sharing these type of videos
Great effort and a wonderful idea worth sharing....
Thank you :)
nice video , please mention some resources to learn ros in simple and interesting way
Hi Nishant,
Thanks for your comment.
I've written a blog to understand basics of ROS with examples. Refer the below link.
www.rosroboticslearning.com/basics-of-ros
could the 74191 be used to accuretly count a DC motor encoder pulses with Raspberry pi - as curremtly my raspberry cannot capture accurate counts?... thanks... help...
Yes. But make sure to use de-bounce circuit also.
When new video?
Thanks for your interest Igor Andrusyk. Sorry to keep you waiting but currently I am busy with other things. Will post a new video next month. Stay tuned.
Regards,
Sai Krishna