Object tracking robot using ROS Moveit and OpenCV | Arduino

Вставка
- Опубліковано 20 лип 2019
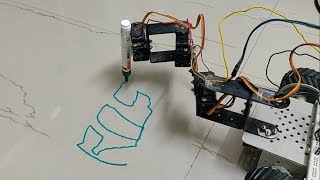
- In this video I will explain how to make a manipulator track a coloured object using OpenCV and ROS Moveit.
For better understanding watch my previous video on 3-DOF planar manipulator project.
Previous Video Link: • Inverse Kinematics and...
Scripts of this project: github.com/bandasaikrishna/3-...
For more stuff on Robotics and ROS: www.rosroboticslearning.com








This was pretty informative, it'll help me a ton in my current openCV project! Thanks!
Great work bro! Really appreciate all the work you post on this channel. Hattsofff
great, your efforts are commendable. thanks
Great video as always, as a fellow ROS user i found vscode to be very handy with ros and as an IDE we can install RoS extension and voila we can even run ros commands in the terminal give it a try if you are not already using it.
useful info. thanks
sir please tell me about wich camra u have used ?
Hello Sir,
Currently I am working on making Swarm Robots. And main problem I am facing is at starting the robots would be randomly arranged and if I want to implement a circle I would set robot 1 to move from initial xy pos to next xy pos. Now how is it possible with opencv ?
If you cant extend some help it would be very grateful. Tho a very nice video.
Thanks.
unable to locate serial_node.py in your source code. where to find it?
how to start this project ? any schematics diagram? components list requirement . I am really exited to do this great project with ros.
what if we need 3d image?
I am a beginner so can you please tell me how did you run python 3 script on ROS as it only supports python 2
Follow below solution to run python 3 ros scripts.
answers.ros.org/question/326226/importerror-dynamic-module-does-not-define-module-export-function-pyinit__tf2/
@@roboticsandroslearning8232 Thanks for the help
Hi, it is great work
what is the version of python and opencv you use? I'm trying to run the python scripts and it shows me some errors
Python: 2.7.12
Open CV: 3.3.1
I have the same versions, but I got this error
OpenCV Error: Assertion failed (size.width>0 && size.height>0) in imshow, file /tmp/binarydeb/ros-kinetic-opencv3-3.3.1/modules/highgui/src/window.cpp, line 331
Traceback (most recent call last):
File "./camera_test.py", line 19, in
cv2.imshow('frame', frame)
cv2.error: /tmp/binarydeb/ros-kinetic-opencv3-3.3.1/modules/highgui/src/window.cpp:331: error: (-215) size.width>0 && size.height>0 in function imshow
I searched for it and they said it related to the opencv version and I should upgrade to 3.4
I'm using ROS kinetic
sir which camra u have used ?
This is a normal desktop usb camera. I have shown the camera too in this video.
can you please suggest a book to study these topics in more details , And thanks for making this video
Go through "Mastering ROS for Robotics Programming" by Lentin Joseph.
Robotics and ROS Learning thanks a lot
@@nishantsharma4465 if you are a beginner go for A gentle introduction to ros