Object detection and 3D pose estimation from Point cloud using Realsense depth camera | ROS | PCL

Вставка
- Опубліковано 16 лют 2021
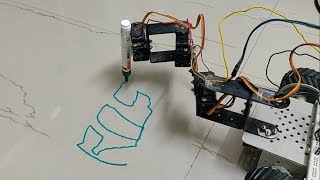
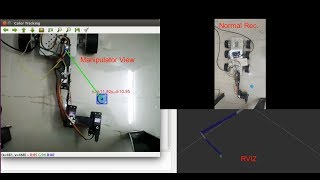
- In this project I will use find_object_2d package for object detection and 3D pose estimation. In this project, Intel Realsense D415 is used for rgb-d point cloud. I have explained the working of find_object_2d and its implementation. I'll try to find more robust ways for object detection and 3D pose estimation in future. Stay tuned to my channel.
Website: www.rosroboticslearning.com/
Source code: github.com/bandasaikrishna/ob...







Man, I am really happy to see you posting. Keep the great work !!
Great video and cool project!
Great video as always. Learnt a lot of new things
Great video. Keep posting
Sir you are awesome
wow, really nice!
Nice.🤩
Hi, great video! I would like to be able to identify an object from all angles. Is it possible to label multiple images for let's say object_12? I can only find the option to add another object...
Hey, this is nice. where can I find the object detection node you used.
If this is not there can you please share some sources which I can follow or we can connect so you can tell me the steps I should follow
Nice, I am also thinking of buying the same can you please tell me how much it costs?
Is it better than microsoft kinect and how ?
hi, Is there a way to rename the different objects which are detected, Can you give me a specific instruction please? How exactly could I do this. Which file do I have to change?
Thank you very much for the Video.
Is there a way to rename the different objects which are detected, for instance "puppet", "keyboard" or "Smiley" instead of just calling them all "object'?
Yes you can change the object ids
@@roboticsandroslearning8232 Thank you. Can you give me a specific instruction please? How exactly could I do this. Which file do I have to change?
First view
Whoal
how did you linked realsense with yolo ?
Is the useable in l515?
How did you get the pointcloud to work so clearly on depth camera? I had to use another method but the quality isn’t as good
So what I did was remap depthcloud to color so that it would work as pointcloud2 but detail has been lost and so it can’t detect objects as well now. Idk if this stemmed from using method 2 for real sense depth cam integration for ros since I used a jetson, lots of people said they come across problems using jetson + intel depth cam
While this vision system is quite primitive, real-time learning like this seems closer to what animals do compared to Deep Learning models which can't learn anything meaningful from a few examples but need giant image datasets instead.
Hi could you please help? I cloned your repo and have my camera plugged in, but when I run roslaunch, it says "Resource not found: object_detection_with_intel_d415"
also what distribution of ros are you using
Hi,
Could you share me the complete error messages after launch the file.
I am using ros melodic distro
How can I contact you?
Rtab is good shit
Hey! can i get the source code please... it is not available in the repo
Link to source code is given in the video description.
@@roboticsandroslearning8232 that does not contain the source code please check the repo.... it will be of great help to me
where is the code , it is not in repo
?
The link to source code is given in the description.
@@roboticsandroslearning8232 There is no script ,only launch file is there