Hey, great that you are back with the project, I had the same problems with the hall sensors, what worked for me was to go back to the old version of the firmware, I'm using 0.5.1 if I remember correctly.
dude a thousand thank yous because i have been needing info on this topic. and you are doing such a great job of explaining it. thanks for you hard work
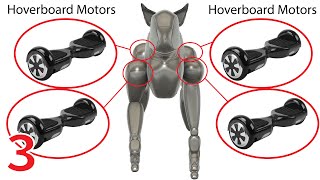
I will be anxiously waiting for the next video about the encoder with greater precision. I am building a complete robotic arm and the best candidate to be the shoulder of the robot are the two Hoverboard motors with Odrive, the issue of precision is essential. I wanted to know what encoder you used in the video and which one you plan to use in the next one.
It's great that the hoverboard motors are so cheap, but what about the rest of the components? Is it possible to replace the odrive controllers with something cheaper? Or use hoverboard parts? I want to say thanks for all the work done
I am surprised there is so much cogging on a hoverboard motor. Can odrive compensate the deadtime? This can help a bit but is not related to the position.









This is so cool. It’s great to see a project end to end like this keep making great content ❤
Hey, great that you are back with the project,
I had the same problems with the hall sensors, what worked for me was to go back to the old version of the firmware, I'm using 0.5.1 if I remember correctly.
Thanks Austin, really appreciate your effort on releasing those vids
it's good to see you again
dude a thousand thank yous because i have been needing info on this topic. and you are doing such a great job of explaining it. thanks for you hard work
Heeeeyyy, been a while. Good to see an update.
I will be anxiously waiting for the next video about the encoder with greater precision. I am building a complete robotic arm and the best candidate to be the shoulder of the robot are the two Hoverboard motors with Odrive, the issue of precision is essential. I wanted to know what encoder you used in the video and which one you plan to use in the next one.
Really useful, nice detail as well thank you, look forward to next video. I am working on the CNC O-Drive project as documented on @Dev255 YT channel.
It's great that the hoverboard motors are so cheap, but what about the rest of the components? Is it possible to replace the odrive controllers with something cheaper? Or use hoverboard parts? I want to say thanks for all the work done
woooooah you're back!
hello i am also doing like robotic arm ,can you help me for the PID tuning of the motor for position accuracy if your are intrested reply back
I am surprised there is so much cogging on a hoverboard motor. Can odrive compensate the deadtime? This can help a bit but is not related to the position.
Isnt that 8040 rail? Or 4020
nice thankyou