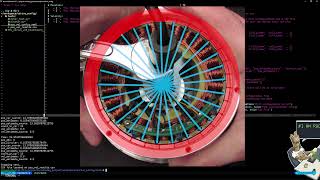
RoboDog Part 6 | How to Use ODrive BLDC Motor Controller

Вставка
- Опубліковано 25 бер 2021
- Finally making stuff move, woo!
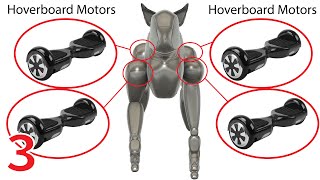
Edit: The torque constant in the video should instead be 8.27 divided by the Kv of the hoverboard motor, which is: 8.27/16 = 0.516875. This has been corrected in the script on Github.
GitHub Code for ODrive Config:
github.com/AustinOwens/odrive...
GitHub Code for RoboDog Project:
github.com/AustinOwens/robodog
ODrive Robotics Website:
docs.odriverobotics.com/
ODrive Documentation:
docs.odriverobotics.com/
Zadig Website:
zadig.akeo.ie/
Obtaining Torque Constant:
discourse.odriverobotics.com/...
Odrive Control System Diagram and Info:
docs.odriverobotics.com/control







Hey man, I'm a new engineering student and I would love to major in robotics. I just wanted to ask how you learnt all these parts and their functions because apart from this video I've never heard of an O-drive and I really would like to have the knowledge that you do.
Appreciate all the work, please keep posting new updates on this project!
Hey, looking forward to Part 7, theese videos have teached me so much and I cant wait to see the final product :)
The ODrive motor controller seems like the most versatile out of all the ones I’ve worked with before. Thanks for the scripts!
Very cool. I've been interested in the ODrive for a while now. When I get around to using them I'll definitely be back to review this video.
Your videos quality is amazing man! Keep going what you do
I am really enjoying following this series.
Very Cool, this is coming together very nicely!
learning so much from you. Keep up the good work!
You're definitely selling me on these ODrive motor controllers, they appear to be equipped with everything you'd realistically need for these types of projects.
Fanstatic overview. Thank you
@AustinTronics I just found your channel. I am another dude digging into biped walking bot and that particular motor is the most suitable for my budget. I hope you did not abandon this project, I have a lot to learn from you and willing to help if you need.
seriously fucking many thanks for the video - I was trying to get it to work for DAYS, read the documentation, etc... no success. The video helped me to get it to work which is... enormously satisfying! thanks!
Hi, I'm new to robotics, however, I am experimenting with a 2 wheeled (drive/steer) device using hoverboard motors and thoroughly enjoyed watching your channel; first class tutorial and easy to follow - thanks. I'm having issues setting up my oDrive 3.6/56v board and followed your instructions closely to try and resolve the issues I'm experiencing. Really, really helpful; at last I get the beep after motor calibration. Unfortunately that's where it stops! odrivetool accepts the hall sensor calibration steps without error, however, I get no movement of either wheel. This is frustrating as I think I've tried everything. I have checked the hall sensors on both motors and all appears well. Am I missing something, can you advise. I get n o errors when I dump odrv0.
hello austin. nice project i love robots but i don't have the programming skills to build one. I have always wanted to build a hexapode and so a question came to my mind using this hoverboard motor system is it possible to load a person's load on a robot of this type, whether it is a quadruped or a hexapod? probably not possible in direct drive configuration but using planetary gearmotors and toothed belts should you be able to get enough torque to carry a large load? sorry my english but i write with a translator
I bought an odrive last year. Need to get some of those hoverboard motors. Do you know of a good place to buy them?
Great work thank you for taking the time and explaining this setup. I was wondering i you have run an anti cogging on the hoverboard motors?
were you able to find a way to mount the encoders on the motors?
Man... this video is exactly what I needed! subd and liked. Great work and thank you!
Very interesting