Розмір відео: 1280 X 720853 X 480640 X 360
Показувати елементи керування програвачем
Автоматичне відтворення
Автоповтор
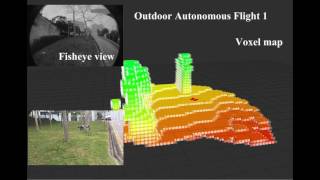
it's so cool!!You using image processing based on stereo or just monocamera?
+Thanabadee Bulunsrichart it uses a Vi-sensor, ie. a stereo camera with IMU (Gyro+accerometer)
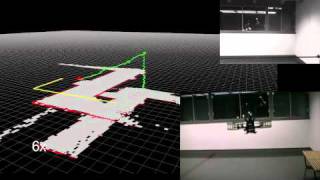
This is cool, can you share the controller package you used for the Matrice M100. I also want to control the quad indoors, thanks. :D








it's so cool!!
You using image processing based on stereo or just monocamera?
+Thanabadee Bulunsrichart it uses a Vi-sensor, ie. a stereo camera with IMU (Gyro+accerometer)
This is cool, can you share the controller package you used for the Matrice M100. I also want to control the quad indoors, thanks. :D