This is one of the best explanations of this I've seen. You've taken the time to do all things that I try to describe but condensed it into a great video. To quote Garth algar "we're not worthy! we're scum..."
Great explanation, Adam. For what it's worth, I'm not familiar with other robot programming standards, but at VW, we're only allowed to use CNT0 or CNT100.
What I was told, whether it's true or not I don't know, is the robot decelerates to a point where its speed equals the continuous value then starts its turn to the next point. There is one condition where the robot will try to go through itself. If the program takes the robot to a point, then just sits there waiting for something, and you hold the robot and jog it around to the other side (let's say to inspect the tool), when you restart the robot it will try to return to its last point by doing a linear move right through itself. I've seen it several times. I always try to remember to do an 'abort all' any time I jog the robot so it starts from scratch and uses the homing routine to get home.
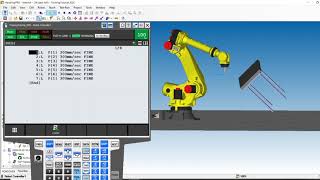
This video offers one of the finest explanations I've come across regarding this topic. You've skillfully condensed all the aspects I endeavor to articulate, resulting in a truly exceptional presentation. Just a small question.! What does 100% signify in J @P1 100% FINE? Is it 100% of the maximum robot speed? Or is it 100% speed of each joint? Having said that if Say I have to run a robot at 35 mm/sec max and the max speed of my robot is say 1000 mm/sec. Do I keep this value at 3.5%?
@@cpapplefamily I spent many years on the PLC side before I switched to robots. You'll pick it up quickly - keep watching my videos, and you can always take the FANUC training course, too!









Watched this again as a refresher. One of your best Adam. Thank you!
This is one of the best explanations of this I've seen. You've taken the time to do all things that I try to describe but condensed it into a great video. To quote Garth algar "we're not worthy! we're scum..."
SCHWING! haha I love it. Thanks so much for the kind words, Dan!
Great visual demonstration of all the different move functions. So helpful to see them all ran and compared together.
Im a novice programmer and these are the best videos iv found!
Благодарю за урок! Учитывая, что я не силен в английском, я все прекрасно понял ))
Спасибо за просмотр!
SImply best lesson. Thank you Adam.
Great explanation, Adam. For what it's worth, I'm not familiar with other robot programming standards, but at VW, we're only allowed to use CNT0 or CNT100.
What a great lesson, i've never saw it on youtube earlier. Good to have such knowledge in robotics.
Thanks Adam
You are the best on the business!!
Thank you so much, Erick! Much appreciated!
Thanks for sharing knowledge...
That's very helpful. Thanks Adam
Love it!
What I was told, whether it's true or not I don't know, is the robot decelerates to a point where its speed equals the continuous value then starts its turn to the next point. There is one condition where the robot will try to go through itself. If the program takes the robot to a point, then just sits there waiting for something, and you hold the robot and jog it around to the other side (let's say to inspect the tool), when you restart the robot it will try to return to its last point by doing a linear move right through itself. I've seen it several times. I always try to remember to do an 'abort all' any time I jog the robot so it starts from scratch and uses the homing routine to get home.
This video offers one of the finest explanations I've come across regarding this topic. You've skillfully condensed all the aspects I endeavor to articulate, resulting in a truly exceptional presentation. Just a small question.! What does 100% signify in J @P1 100% FINE? Is it 100% of the maximum robot speed? Or is it 100% speed of each joint? Having said that if Say I have to run a robot at 35 mm/sec max and the max speed of my robot is say 1000 mm/sec. Do I keep this value at 3.5%?
Wow..
This very helpful.
Tremendous
I love your Channel! Will you make a video where you pick moving parts on a conveyor with 2D Ir vision?
Thanks
Thank you! And thanks for the suggestion, I can certainly make work of that!
Thanks for this. How about next we look at the configuration for each where we can select if its cartesian or joint
Excellent idea! I sense a "Part 2" coming soon...
I look forward to it. My work buddies who are more on the robot side of the business can't seem to explain it to me. I'm on the PLC side.
@@cpapplefamily I spent many years on the PLC side before I switched to robots. You'll pick it up quickly - keep watching my videos, and you can always take the FANUC training course, too!
@@AdamWillea thanks I'm already deep into the crossover. Been to the Advanced TP2 about 6 years ago
@@cpapplefamily Super! Keep it up!