Це відео не доступне.
Перепрошуємо.
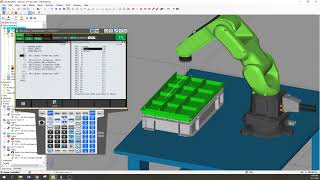
FANUC Pallet Array Programming

Вставка
- Опубліковано 7 сер 2024
- A quick overview of common practice for creating a modular program using FOR LOOPS and one taught point for tray tending, pallet load/unload, or any array of parts to be handled.








I have been searching this tutorial on You Tube. This is the best one I have seen. Thank you Adam
Hey Adam,
Great Video, and great channel as well!
I'm a Robot Application Engineer for FANUC in South Africa.
One suggestion I have for the pick/place programs, is for programmers to create and call a program to open/close grippers.
I've found it makes your workflow much quicker, especially if people don't use this specific method of array handling.
Within these sub programs, it makes it easier to adjust something like a 'wait' command within one program, than to have to search for every instance of a gripper opening/closing in a massive handling program.
Just a little something I hope someone here can find useful.
Looking forward to seeing more of your content!
Hello Leonard! Great to meet a colleague from across the pond!
You make an excellent point, and using sub-programs or macros for PICK/PLACE is definitely a wise standard.
In this example since I was using RoboGuide simulated picks to "CALL PICKUPTRAY" etc., I didn't make a CALL program to go call the sim pick. But most certainly in a typical real robot application this makes sense.
Thanks for the note! Keep it up!
These videos are awesome. It is great taking the in person training and these help with info you may have forgot. Especially helps someone like me who only programs a couple times a year.
Thanks so much, Mike! I appreciate the comment and am glad these help!
Great, the best time spent on youtube. Keep it up... you have got me as your viewer. I work mostly with KUKA but the tips you give are amazing. The FANUC was reviewed by us but it is just too big M-2000iA and couldn't fit in our environment.
Thanks so much Adam sir ....this indeed will help me alot ..... because recently my company has a upcoming project on fanuc robot which will need palletizing ☺️🙏
Love the videos. New to fanuc. Have basic tooling class completed. Doing vision next Hope I can be as efficient as you are programming one day.
Thanks, Vic! Keep on it, you'll be there before you know it!
Glad I found this...thank you
Adam your videos are expanding my horizons. Thank you!!! Have you done a video explaining the different register statements? I would have never known about the PR[I,j] statement if I had not seen this video. Keep them coming.
Thanks so much! I'm very glad these are helping. I have a few good videos coming up in the queue, just been to busy to edit anything!
There are no specific videos on various register statements, but that could serve as a good topic in the near future.
@@AdamWillea can you give me facebook or twitter i need help
can you give me facebook or twitter i need help
Great ideas and learn easily sir
Thanks alot💥
Awesome video I am glad I found it, I am working on the same premise as this video other than mine is a spot weld that needs to index every time the program is run till the plate it is welding is full, 6in by 10in plate that spot welds are 10mm apart in the x and the y direction. Any help would be greatly appreciated...
Great Video Adam!
great video, thank you for your channel
It is very useful , thank you so much
Hey Adam, Can you do a Tutorial on 2 trays Pick and Place old school with no FOR LOOPS? Sorry if You may have already. I have an old RJ3iB trying to setup. Thank you for your wisdom. You're a great teacher
Thanks for the Video Adam.
Could you explain the extra Steps it would take to set this up with a UserFrame of the Tray?
Thank you for your excellent work.
Hi Reto! Yes it is a very good practice to teach the tray with its own User Frame. Very simply, using the 3-point method, you would teach a corner origin, and X-direction corner, and a Y-direction corner.
I will create a new video soon to help show users how to create and call Frames in the program. Thanks!
@@AdamWillea Thank you for your Response. I managed to create a User Frame quite easily, it took me a long time to figure out how to assign the "Trayoffset" to the User Frame that I created. Really looking forward to seeing more videos, and the professional solution. Thanks.
excellent
Hi Adam! Thank you so much for yours very useful tips!
...I'm thinking about another problem: Imagine that I want to perform a Pick and Place Program, using your suggestions about FOR loops, but I have to Pick from a 3x4 Matrix and I can place into two boxes, each of 2x3 matrix. Could you have any suggestion to manage the different FOR loops?
Great!!!!
Hi Adam,
great training videos, really enjoying it! Keep going!
Say, I noticed the program lines for moving the robot changing from "L PR[*]" to "L @PR[*]", once you start the program.
What exactly does the the "@" annotation mean? I assume, it reports the movement is scheduled within the motion control?
It means the robot is "at" the position at the moment. So the robots position matches or is close to matching the programmed position. Good question. I hope this helps.
Great Video!! Can you please make a video on DCS?
Thanks! I will certainly make a DCS video asap this week. Stay tuned!
1st comment, 5th subscriber and... Adam!? That Adam? Lol I was like.. Dude I know you! Haha
Great videos man! Thanks a lot
Thanks so much, Jorge! Yep it's me! LOL. I hope to make several more videos soon that answer common questions for robot applications. Thanks so much for subscribing! I'm sure I'll see you around! :)
Nice!
Sir please cover these topics in palletizing--
1.palletizing using special palletizing function available in robot.
2.single column palletizing
3.double column palletizing
Thank you for the recommendation! I will work to add these.
Thanks for the video. Is there a way to setup the loop to where it is not in the main program, but every time the program gets called it will increment by 1 and end the program. Pretty much incrementing by one but ending the program instead of jumping back up to the begging of the for loop?
Thanks, Greg. Yes - instead of using the "FOR" loops, you could easily use Registers and some basic incrementing math like: R[x] = R[x] + 1. That way, every time the program is called, it adds 1 to the register.
When doing this, you'll need to make sure you have an "IF" statement for your homemade counter to reset R[x] back to 0 at some point depending on rows, columns, etc.
Also as another alternative, you could pass arguments to the program and send a value each time you call it. Still needs R[x] math, though.
@@AdamWillea thanks for the tip. That worked out really well.
Hi Adam, thank you for making such a helpful video, how can i get a roboguide trial up to 65 days, i can have only up to 30 days. THanks
Hi Adam, I‘m completely new to Fanuc robots. Is there a way to make a full graphical user interface (for example a 20“ touchscreen with a RPI) to configure an array without code but just couple of parameters?
Hi Maximilian, in general - YES. However, it will require a lot of background programming. FANUC offers several handy tools such as Palletizing TPE and PalletTool which offer easy-to-use setup and interface for building arrays. But in the end, if you want an operator-style interface on a screen, you'd have to have a program that takes in the screen's input, process the numbers/offsets/rows/columns/heights, and update positions in the code. It's essentially writing modular code, then passing variables.
Hi Adam, Is there anyway you could share this cell file? Also, it took me a while to figure out how you created the PART array. "Number of parts" wasn't discussed in this video, and I thought I'd tip others. It's within the PARTS tab, in the fixtures properties. Pretty easy to set up number of parts and spacing. THANKS!!
I would like that too!!!! :)
If I wanted to add a couple layers would I have to create a PR for the tray offset, then write another FOR loop?
@Adam Willea Looking forward to your response.
You are my very last response in the long video posted today here: ua-cam.com/video/Uw2AsKTt6wo/v-deo.html
Thanks!!
Is there any condition to active "Tool Offset"? It seems tool offset doesn't work in my program... it only move as just "offset"
Hello, depending on your robot, robot age, and software, this option may not appear. When teaching a point, be sure to click "CHOICE" and scroll through all pages to see if "TOOL OFFSET" is in there but perhaps organized different.
Adam: I cannot find that gripper on my version 8 rev. H of RoboGuide software. Can you post a link so I can download it.
Hi Andy, I did make this as a custom gripper. Sometimes I browse publicly sourced gripper files online for use, or make my own. The key is to get them in IGES format and they'll import in just fine.
Looks like a scaled standard 3jaw_Gripper
sir please make videos on ethernet/profinet Communication of fanuc robot
Thanks! Please check out my other video on Ethernet i/o communications with Allen Bradley PLC's here: ua-cam.com/video/bkGQ0kCXv8E/v-deo.html
That may help get you started in the right direction.
Hello Adam, how are you? Could you make the backup of this project available?
Hello Hudson, unfortunately I am not able to host these backups publicly. Please try to recreate the code from the tutorial as best you can and contact FANUC with any questions if you hit a snag.
@@AdamWillea thanks Adam,
publish more videos, I liked a lot of explanations
@@hudsoncosta3677 Thanks so much! I'll keep more coming!
Adam Willea facebook and twiter ?
How I can get simulator? Please
Thanks for asking. The simulator is called RoboGuide. Please call 888-FANUC-US and they can provide a quote for the software.
Thank a lot Adam
code ? i sent to code.thanks
Hanzhen harmonic drive gear , over 30 years experience , robot gear