My frustrations with the topic are captured perfectly in the section starting at 0:45 - the material often seems to be written from one phd student or professor to another, and though it may be mathematically "elegant", its a dense forest of squiggles to those not recently in academia. Additionally, for what is an intensely physical subject, requiring lots of images and diagrams, especially with IK the tendency to start off with a massively simplified 2 dof line drawing, then suddenly leap to the full mathematical solution of a 6 dof arm with none of the steps explained, makes the topic very inaccessible. I have the Spong book and found it to be equally opaque. Maybe you should write a Robot Kinematics For Dummies book? Looking forward to watching the series here!
Happy to share. I got quite frustrated trying to figure this all out watching videos and reading papers written from an experts point of view. Hope I can pass along what I learned so people can understand it.
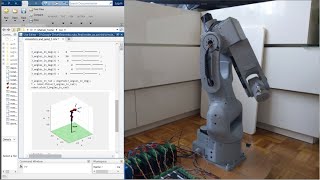
what is the software used to design this robot and to simulate its movement does anyone know the software that chris Annin used (SolidWorks , Catia...)??? Thanks
This channel and project is incredible. Did you start with the intention of open sourcing it? Or was that an after thought. Cause your presentation is really good and I like the unconventional way of figuring things out, I think that's where real creativity comes from. Keep building things my friend!
thank you. it was mostly an afterthought. i didn't really think it would go far - I just wanted to make a stepper robot, something that sparked my curiosity and after a made a couple and started looking at making a usable one for material handling I thought I would share it.
Thalanayar Muthukumar This is the software that I wrote for the AR2 robot. There is a link in the description to my website and the git hub repository where you can download software and plans for the robot for free.
Thanks Chris. I was able to run the control software. I just embarked on a journey to learn robotics, kinematics and inverse kinematics and your video helped.
Yusuf Demir Thank you very much, I’m very glad to help and share my knowledge. It gets quite frustrating trying to learn these things from books and videos where people don’t really explain it and they obviously know what they’re talking about but they don’t know how to convey it to someone who doesn’t.
Thank you so much Chris for making this available. I'm beyond words and I'm about to build one! I would like it to be a little bit quicker, any suggestion on which steppers to replace, and by what? Thank you again so much!
You can change the speed multiplier in the Arduino program please see the calibration videos. I have a video on articulation showing it moving a bit faster. You can select higher gear ratio motors from stepper online if you want you would just have to recalibrate the robot and figure out number of steps given each axis range of motion. Again this should be covered in the calibration video. I wouldn’t recommend making the robot to much faster as it can get a little bit shaky if you go too fast
great work! still toBeDone: what inaccuracy must we expect it the angle1 and angle2 and angle3 have a deviation of say +-0.1% ? this can be calculated but may be also useless to calculate for many applications. what I talk about: for many applications we need a sturdy robotic arm with as little joints a possible and with high accuracy as possible - sure this can be derieved from your great work! I invite you to my group "OpenIdeas cnc&3dp" for further discussions.
The biggest inaccuracy is the backlash in the motor. The manufacturer claims 1.5 to 1° of backlash but it varies from motor to motor. Overall when I take it to a dial indicator I'm currently getting about .010" to .015"of repeatability difference , But also consider that's under compression of the robots weight in what it's doing. The software should return the robot to an exact position so any and inaccuracy is in the backlash of the motor stretch of the belt or lack of rigidity in the arm.
figuring out the kinamatics took a few months working on it as I had time. The overall build of the robot and writing the software was probably closer to 6 months in my spare time.
If you open the AR2.py source code with a text or python editor you should be able to see all the code including the kinematics. I figured out the kinematics on the excel sheet first and then basically copied it into the program line by line for each cell in the spreadsheet.









You are the god of opensource robotics! Thank you so much
Anose55 thank you, I'm glad to put this out there and help others. Thanks again.
You know your stuff mate, huge respect for making it open source👍
My frustrations with the topic are captured perfectly in the section starting at 0:45 - the material often seems to be written from one phd student or professor to another, and though it may be mathematically "elegant", its a dense forest of squiggles to those not recently in academia. Additionally, for what is an intensely physical subject, requiring lots of images and diagrams, especially with IK the tendency to start off with a massively simplified 2 dof line drawing, then suddenly leap to the full mathematical solution of a 6 dof arm with none of the steps explained, makes the topic very inaccessible. I have the Spong book and found it to be equally opaque. Maybe you should write a Robot Kinematics For Dummies book? Looking forward to watching the series here!
Indeed and it's a very simple concept almost everyone can easily grasp and most people can solve if given a day or two.
Thank you so much for doing all of this.
Thank you so much for sharing your work. Very well done.
Happy to share. I got quite frustrated trying to figure this all out watching videos and reading papers written from an experts point of view. Hope I can pass along what I learned so people can understand it.
great works,opensource industrial robotics
This is incredibly useful for a similar pet project of mine. Thanks for making it available in all its detail!
my pleasure.
Thank you very much , great!
Nice explanations, i like it !
thank you
God bless you!
Kadir Kafalı thank you
Great help... thanks Chris...
anytime, I hope this info is helpful.
1:35 Dear sir, the sortware you use is the roboDK sortware ?
thank you ,sir
Thank you very much
You are welcome, glad it helps. Thank you
Have you considered making a delta robot?
what is the software used to design this robot and to simulate its movement
does anyone know the software that chris Annin used (SolidWorks , Catia...)???
Thanks
Roki Sim
This channel and project is incredible. Did you start with the intention of open sourcing it? Or was that an after thought. Cause your presentation is really good and I like the unconventional way of figuring things out, I think that's where real creativity comes from. Keep building things my friend!
thank you. it was mostly an afterthought. i didn't really think it would go far - I just wanted to make a stepper robot, something that sparked my curiosity and after a made a couple and started looking at making a usable one for material handling I thought I would share it.
At 5:10, it shows control software for the stepper motor robot. What software is this?
Thalanayar Muthukumar This is the software that I wrote for the AR2 robot. There is a link in the description to my website and the git hub repository where you can download software and plans for the robot for free.
Thanks Chris. I was able to run the control software. I just embarked on a journey to learn robotics, kinematics and inverse kinematics and your video helped.
Chris are you an angel ? ;) Im glad that the world still has human as you sir. Im Electronics Engineer Im ready to serve you ..
Yusuf Demir Thank you very much, I’m very glad to help and share my knowledge. It gets quite frustrating trying to learn these things from books and videos where people don’t really explain it and they obviously know what they’re talking about but they don’t know how to convey it to someone who doesn’t.
Thank you so much Chris for making this available. I'm beyond words and I'm about to build one! I would like it to be a little bit quicker, any suggestion on which steppers to replace, and by what? Thank you again so much!
You can change the speed multiplier in the Arduino program please see the calibration videos. I have a video on articulation showing it moving a bit faster. You can select higher gear ratio motors from stepper online if you want you would just have to recalibrate the robot and figure out number of steps given each axis range of motion. Again this should be covered in the calibration video. I wouldn’t recommend making the robot to much faster as it can get a little bit shaky if you go too fast
great work!
still toBeDone:
what inaccuracy must we expect it the angle1 and angle2 and angle3 have a
deviation of say +-0.1% ?
this can be calculated but may be also useless to calculate for many applications.
what I talk about:
for many applications we need a sturdy robotic arm with as little joints a possible and
with high accuracy as possible - sure this can be derieved from your great work!
I invite you to my group "OpenIdeas cnc&3dp" for further discussions.
The biggest inaccuracy is the backlash in the motor. The manufacturer claims 1.5 to 1° of backlash but it varies from motor to motor. Overall when I take it to a dial indicator I'm currently getting about .010" to .015"of repeatability difference , But also consider that's under compression of the robots weight in what it's doing. The software should return the robot to an exact position so any and inaccuracy is in the backlash of the motor stretch of the belt or lack of rigidity in the arm.
1:42 what software have you used
It’s called Rokisim, free robot simulator
what are materiel of frame???
Hanzhen harmonic drive gear , robot arm gear , over 30 years experience ,
How long did this take you?
figuring out the kinamatics took a few months working on it as I had time. The overall build of the robot and writing the software was probably closer to 6 months in my spare time.
That is awesome.
So nice work! Excuse me ,can you tell me where is the inverse kinematics code which matches the excel document ?
If you open the AR2.py source code with a text or python editor you should be able to see all the code including the kinematics. I figured out the kinematics on the excel sheet first and then basically copied it into the program line by line for each cell in the spreadsheet.
at 3:00/15:06 ,how the demo are to re-appear
Hello, I'm not understanding what you are asking, please elaborate and I will try to help.