I love that I live in an era where I can wonder what "Lyapunov Stability" is while I'm sitting on the couch and have someone instantly explain it to me rigorously.
Hello! There are very many indeed! If you have access to a university library, the book Nonlinear Systems by Khalil is a very good masters/graduate student level text.
hello Professor, thanks for such a great video. I have a couple of questions regarding this method. What is the difference between this method and a method like Routh stability or Nyquist? Another question, how can this be related to design a control feedback law based on a Lyapunov function candidate? ( using control Lyapunov functions)
Thank you! Good question. The major difference here is that we are working with nonlinear systems. The Routh-Hurwitz criterion and the Nyquist criterion only apply to linear systems., but this Lyapunov method also works when the systems are nonlinear too. A very minor detail though - the Nyquist criterion can in fact be applied to linear systems with delays, and the Lyapunov stability theorem cannot - but there are generalisations of this that do work, but they are quite a bit more advanced. Your second question also makes a lot of sense! When you do Lyapunov based design, you start with a dynamical system \dot{x}=f(x,u) Now I consider a control law u=k(x), where k(x) is a function that I myself can choose. What I then do is pick a Lyapunov cadidate V(x), and write out Vdot=grad(V).f(x,k(x)). I then look at the resulting equation and try to spot a way to choose k(x) so that the resulting equation is negative definite, since this would mean that my system with the control law u=k(x) is asymptotically stable! This would really need a video to explain properly - I'll try to do this at some point I think. But hopefully this gives you the idea
This assumes there is only one equilibrium point x* within the Omega region. Is this for simplified introduction, or a restriction of the Lyapunov method, or ... ?
This is a good question - and a bit tricky! This really becomes an issue when you want to show asymptotic stability on some region (e.g. global asymptotic stability). Regions of attraction are not discussed in the video, but I'll try to answer here. The issue is fundamental. If there are multiple equilibrium points in a region, that region cannot be a region of attraction for any of the equilibrium points. This is because if your initial condition coincides with an equilibrium, the trajectory will stay there. So if you start at one equilibrium, you will never tend towards another, and vice versa, meaning the entire region cannot be a region of attraction for any one of the equilibrium points. It is also a fundamental block for the Lyapunov condition discussed here. This is because \dot(V(x(t)))=grad(V(x)).f(x), so if f(x)=0, \dot(V(x(t)))=0. Therefore you can never ensure the strict negative definiteness requirement at an equilibrium point, so if there is another equilibrium in the region being studied, the stability condition will never be satisfied (this is not surprising, because if you could, you might be able to prove asymptotic stability of a trajectory starting there towards another equilibrium point, which is impossible!). The most common fix is to use the LaSalle invariant set principle. I made another video about LaSalle, but it does not discuss the multiple equilibrium case: ua-cam.com/video/TJdmRj44QNQ/v-deo.html&ab_channel=richardpates But basically whenever a Lyapunov condition fails because \dot(V(x(t)))=0 at a point that is not equal to the equilibrium that is being studied, it still follows that x(t) will tend towards the largest subset of the points for which \dot(V(x(t)))=0 and which is invariant. When you're in the situation which you describe, it is often the case that this set equals the set of equilibrium points, and so LaSalle's condition proves that every trajectory tends towards one of the equilbrium points - though it doesn't specify which one. Sometimes you can then go further. For example if only one of those equilibria is locally stable, it then follows that every trajectory that starts at a point that is not identically equal to one of the equilibrium points will tend towards the stable equilibrium.
Sir I have two questions 1. What is the significance of designing the adaptive backstepping controller? 2. What are the advantages of the common Lyapunov function over the average dewell time ?
Hello, These are really rather advanced topics! I'm not really an expert in these areas, but can try to comment at a very high level. I think the major point is that designing Lyapunov functions are hard! So many researchers have tried to develop different 'general' techniques. I would try to view these different approaches as different items in your tool kit - no one technique is better than the other. Some will work on some problems, others and others, and on some problems neither will work! 1. Backstepping is one such technique. It provides a systematic approach to try and build a Lyapunov function by first designing a function that 'works' for one of your states, then extending it to the second and so on. The adaptive element only comes in if your system is time varying, so systems of the form in the video do not need an adaptive element. Adaptive methods typically attempt to update or generalise the Lyapunov functions used to account for non-autonomous dynamics. 2. These are two techniques that have been developed to try and analyse switched systems (a particular type of non-autonomous systems). Common Lyapunov functions give conditions that work no matter how fast the switching is occurring. As far as I know, average dwell time conditions try to sharpen things by incorporating information about how fast the switches occur into the analysis.
@@richard_pates .Thank you very much sir for giving such a good reply, you have answered my question in a very beautiful way, I thank you very much for this.
Thank you very much. But how do we know V'(x) = gradient(V(x)).f(x) ? coz V can be anything, for example x² + y² + 2y, so how can this dot product give the derivative of V ?
Also I dont understand, in class we saw that lyapunov fonction is a fonction of time V(t) and here it's a function V(x) depending of one of the coordinate of the trajectories ?
Hello proffesor, i like your explanation, but I already studied Lyapunov stability from Slotine book(Applied nonlinear control) and it talks that the theorem is valide around origen(e.g. x*=0). For you, can x* be any equilibrium point define in Omega?. Peace!!
Good question! The answer is yes, x* does not have to be the origin. I'll make a few extra comments though: 1. In some sense it is no real loss of generality to assume that x*=0. This is because we can always change our coordinate system through y=x-x*, and then rewrite all our dynamics in the new state variable y. In these coordinates the equilibrium point will be y*=0 2. If we have more than one equilibrium in omega, the theorem is still valid. However you will not be able to show the stronger stability condition of asymptotic stability. This is because at both the equilibrium points f(x)=0, and so dot{V}=0 at both the points, and so we cannot have dot{V}
@@richard_pates thanks for explanation. I have another question respect region Omega. It could get any form ?? For example be an open region or has an annulus form?







I love that I live in an era where I can wonder what "Lyapunov Stability" is while I'm sitting on the couch and have someone instantly explain it to me rigorously.
I hate that im living in a era where i have to find and understand "Lyapunov Stability" to finish my university and find a decent job.
@@infernal4415 Don't do things you hate
@@EfExXE that sounded like some unrealistic woke shit to me
@@EfExXE well i have to study them to become a teacher for kids... so i have to do it but hate it :D
@@infernal4415 huh?
Thanks for making these videos! They help reinforce my school lectures
A very beautiful theorem and a powerful tool to validate system stability.
I love how the subtitles insist with "ethanol functions" kkkkk
Hello Professor, i would like to ask if there are any papers/ articles available on this issue.
Above all very good explanation
Hello! There are very many indeed! If you have access to a university library, the book Nonlinear Systems by Khalil is a very good masters/graduate student level text.
hello Professor, thanks for such a great video.
I have a couple of questions regarding this method.
What is the difference between this method and a method like Routh stability or Nyquist?
Another question, how can this be related to design a control feedback law based on a Lyapunov function candidate? ( using control Lyapunov functions)
Thank you! Good question. The major difference here is that we are working with nonlinear systems. The Routh-Hurwitz criterion and the Nyquist criterion only apply to linear systems., but this Lyapunov method also works when the systems are nonlinear too. A very minor detail though - the Nyquist criterion can in fact be applied to linear systems with delays, and the Lyapunov stability theorem cannot - but there are generalisations of this that do work, but they are quite a bit more advanced.
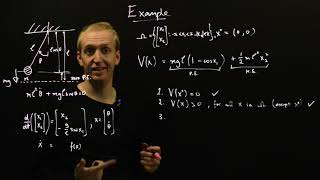
Your second question also makes a lot of sense! When you do Lyapunov based design, you start with a dynamical system
\dot{x}=f(x,u)
Now I consider a control law u=k(x), where k(x) is a function that I myself can choose. What I then do is pick a Lyapunov cadidate V(x), and write out
Vdot=grad(V).f(x,k(x)).
I then look at the resulting equation and try to spot a way to choose k(x) so that the resulting equation is negative definite, since this would mean that my system with the control law u=k(x) is asymptotically stable! This would really need a video to explain properly - I'll try to do this at some point I think. But hopefully this gives you the idea
@@richard_pates Thank you for such a great answer.
@@richard_pates Thank you for such a great answer.
This assumes there is only one equilibrium point x* within the Omega region. Is this for simplified introduction, or a restriction of the Lyapunov method, or ... ?
This is a good question - and a bit tricky! This really becomes an issue when you want to show asymptotic stability on some region (e.g. global asymptotic stability). Regions of attraction are not discussed in the video, but I'll try to answer here. The issue is fundamental. If there are multiple equilibrium points in a region, that region cannot be a region of attraction for any of the equilibrium points. This is because if your initial condition coincides with an equilibrium, the trajectory will stay there. So if you start at one equilibrium, you will never tend towards another, and vice versa, meaning the entire region cannot be a region of attraction for any one of the equilibrium points. It is also a fundamental block for the Lyapunov condition discussed here. This is because \dot(V(x(t)))=grad(V(x)).f(x), so if f(x)=0, \dot(V(x(t)))=0. Therefore you can never ensure the strict negative definiteness requirement at an equilibrium point, so if there is another equilibrium in the region being studied, the stability condition will never be satisfied (this is not surprising, because if you could, you might be able to prove asymptotic stability of a trajectory starting there towards another equilibrium point, which is impossible!). The most common fix is to use the LaSalle invariant set principle. I made another video about LaSalle, but it does not discuss the multiple equilibrium case:
ua-cam.com/video/TJdmRj44QNQ/v-deo.html&ab_channel=richardpates
But basically whenever a Lyapunov condition fails because \dot(V(x(t)))=0 at a point that is not equal to the equilibrium that is being studied, it still follows that x(t) will tend towards the largest subset of the points for which \dot(V(x(t)))=0 and which is invariant. When you're in the situation which you describe, it is often the case that this set equals the set of equilibrium points, and so LaSalle's condition proves that every trajectory tends towards one of the equilbrium points - though it doesn't specify which one. Sometimes you can then go further. For example if only one of those equilibria is locally stable, it then follows that every trajectory that starts at a point that is not identically equal to one of the equilibrium points will tend towards the stable equilibrium.
@@richard_pates Thanks for the very thorough answer. I'm thinking it is more than 'a bit tricky'!
Sir
I have two questions
1. What is the significance of designing the adaptive backstepping controller?
2. What are the advantages of the common Lyapunov function over the average dewell time ?
Hello,
These are really rather advanced topics! I'm not really an expert in these areas, but can try to comment at a very high level. I think the major point is that designing Lyapunov functions are hard! So many researchers have tried to develop different 'general' techniques. I would try to view these different approaches as different items in your tool kit - no one technique is better than the other. Some will work on some problems, others and others, and on some problems neither will work!
1. Backstepping is one such technique. It provides a systematic approach to try and build a Lyapunov function by first designing a function that 'works' for one of your states, then extending it to the second and so on. The adaptive element only comes in if your system is time varying, so systems of the form in the video do not need an adaptive element. Adaptive methods typically attempt to update or generalise the Lyapunov functions used to account for non-autonomous dynamics.
2. These are two techniques that have been developed to try and analyse switched systems (a particular type of non-autonomous systems). Common Lyapunov functions give conditions that work no matter how fast the switching is occurring. As far as I know, average dwell time conditions try to sharpen things by incorporating information about how fast the switches occur into the analysis.
@@richard_pates .Thank you very much sir for giving such a good reply, you have answered my question in a very beautiful way, I thank you very much for this.
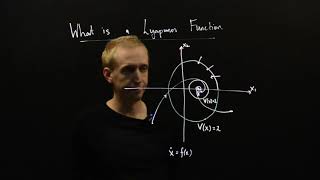
Thank you very much. But how do we know V'(x) = gradient(V(x)).f(x) ? coz V can be anything, for example x² + y² + 2y, so how can this dot product give the derivative of V ?
Also I dont understand, in class we saw that lyapunov fonction is a fonction of time V(t) and here it's a function V(x) depending of one of the coordinate of the trajectories ?
And another thing you write V(x) tends to infinity but I thought a lyapunov function was always decreasing ?
@@geogeo14000 V(x) has always to be larger than zero, except equalibrium point. What has to be negative or zero is it's derivative.
Maybe take a look what exactly grandient is. It will make it clear.
@@geogeo14000 V(t) would make sense only for first order systems. Otherwise it's always function of the state x.
Hello proffesor, i like your explanation, but I already studied Lyapunov stability from Slotine book(Applied nonlinear control) and it talks that the theorem is valide around origen(e.g. x*=0). For you, can x* be any equilibrium point define in Omega?. Peace!!
Good question! The answer is yes, x* does not have to be the origin. I'll make a few extra comments though:
1. In some sense it is no real loss of generality to assume that x*=0. This is because we can always change our coordinate system through y=x-x*, and then rewrite all our dynamics in the new state variable y. In these coordinates the equilibrium point will be y*=0
2. If we have more than one equilibrium in omega, the theorem is still valid. However you will not be able to show the stronger stability condition of asymptotic stability. This is because at both the equilibrium points f(x)=0, and so dot{V}=0 at both the points, and so we cannot have dot{V}
@@richard_pates thanks for explanation. I have another question respect region Omega. It could get any form ?? For example be an open region or has an annulus form?
My proff sucks 😣🥱
Sorry to hear it. Long live the internet!
u didnt explain things well
stupid
explanation does not mean you rewrite what in the paper