Rebotics_07_Forward Kinematics Example 01 (DH parameters)

Вставка
- Опубліковано 12 жов 2024
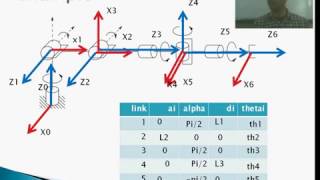
- Forward Kinematics
Four DH parameters
DH Example 01
see example 2
• Rebotics_07_Forward Ki...
see DH Example 03
• Robotic 08_Forward Kin...
see DH parameter video
• Robotics_06_Foward Kin...








شكرا دكتور في ميزان حسناتك ❤
Really great explanation. Thanks sir
شكرا
thanks sir
شكرا لك دكتور
شكرا لك استاذ
ياريت تنزل فيديو عن Inverse kinematics in matlab
ربنا يرزقك الجنة
احلى دعاء سمعته وجزاكم مثله
Why theta-1, both frames (Frame-1 & Frame-2) are same?
There are not the same) First join is a revolute joint, that's why we have some rotation. theta2 and theta3 are zero because these are prismatic joints
Hello... If i give you a problem can you help me solve that sir.
ما فهمت شي و شكرا
CovidImages need to be invested more than half19