Dear Angela, I really appreciate your tutorial. I found your course is extremely useful to beginners!! Countless love for the slow and patient explanation. And thanks to modern technology, the faster learners can apply 1.25 to 1.5 speed while beginners like me really enjoy the slow pace. Once again, thank you so much.
What a great video. Thanks for your wonderful explanation. I have been struggling with the D-H representation and your video made it very clear for me.
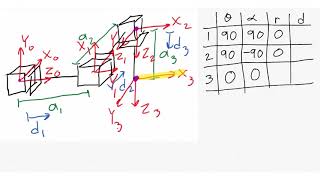
First of all, thank you very much for your awesome videos. They've already helped me a lot. Secondly: at 24:25, when finding the value for the third d, shouldn't the signal be negative since the distance between frames 3 and 4 will be decreasing when the prismatic motion happens? And I wonder if the same shouldn't happen between frames 2 and 3. Thank you once more.
Great video, thank you for your work. My only nitpick is the background noise is a little distracting at parts. I kept thinking people were talking near me.
Hi, great series of videos, I wish every teacher had such understanding of topic and ability to share it in so easily digestible form. I have a question about 27:30 , how exactly do we convert DH parameter table to HTM? Does this matrix always looks the same?
Yes, the HTM is the same always; the only thing that changes is the values of the parameters. Each row of the table produces one matrix, which you then multiply together at the end. For example, suppose you have a manipulator with two joint. You will have a table with two rows. Get H0_1 by plugging in the values from the first row of the table, then get H1_2 by plugging in the values from the second row, then get H0_2 by multiplying H0_1*H1_2.
Hello Angela, Wonderfully illustrated and explained videos. I have a question, when drawing the kinematic diagram, should we include the end effector joints too, or just calculate the distance to the centre of end effector? Off topic: Have you considered using ROS for programming robots and simulation?
20:35, When rotating around the x2 axis to match the frames 1 and 2, both positive and negative 180 degrees seems to indicate the same location. Would it be a problem to write -180 degrees?
For the first and second example shown....what is the joint notation schema of the robot ?? Is that are revolute joints (V) or rotational joints (R) ??? plss reply mam
Hi Angela, 1st of all I really appreciate the course, it's very nice but I have one question about the second alpha, isn't it supposed to be negative because that 180 degrees seems to be negative from frame 1 to frame two of you rotate z
when we don't know distance from frames .then we can use inverse kinematics to find d & r in dh parameter ,Is this correct? and are there any other method
Hi Angela! Your videos have been amazing and have really helped me get a grasp on this topic. Thank you! I just have a small doubt. For the parameter 'd' in row 1 (which is the distance in the Xn direction ) we found that the distance is a2. But as the joint variable theta1 rotates, the distance decreases in the Xn direction to a2cos(theta1). So shouldnt the parameter be written as a2cos(theta1) instead of a2? The same doubt arises for the value r in row 2 also. Kindly help me resolve this
madam can you simply tell me, how i can get the c alpha and r ,bcz when I'm doing my hm transformation, i never encounter sort of this value, bundle of love for nice explanation overall,
Your lecture and explanation is superb. one question, as we are taking anticlockwise positive, isn't it -90 in first example explaining alpha. Hoping for your reply.
Alpha is the rotation around the X axis. For the first row, take your right hand and put your thumb in the direction of X1, which is pointing to the right. You should notice that your fingers are curling towards you. Now, Z0 is pointing up, but we need to get it to point in the same direction as Z1, which is pointing towards us. So, the direction we rotate the 0 frame is towards us, which is the same direction our fingers curl. Another way to think of it is to imagine yourself standing and looking at the frames from the right, so that X1 is pointing directly at you. When you rotate the 0 frame, which direction do you rotate it to get Z0 to match Z1? You rotate it counter-clockwise, which is positive.
@@asodemann3 Then we're matching the Zn-1 frame to the Zn frame and not the other way round ??? I imagined looking from both X1 and X0 to the YZ plane, respectively. When we described the alpha, we defined it so as to match the frames. This might confuse some people because there are two ways to match these two frames, one having 90 degrees of rotation around x and the other having -90 degrees. Do we need to match from the preceding frame to the next frame? Thanks for all the effort you put in to shed a light on the Robotics.
Theta 1 is the 'joint variable' - it represents how much that joint has turned as the robot moves around. So, even though the two frames are in the same position now (in the picture), they will not be later on when the robot has moved. Including the joint variables in our equations insures that our equations will still be true and valid no matter how the robot moves.
I dont understand why do we in the first example add Theta1 and Theta2 in the Theta column if the x axis are already lined up. Is it always the case if the x axis are lined up? Sorry for writing after four years.
The 'Theta' there accounts for the joint angle. In other words, the values of Theta1, Theta2, and so on are all 0 as the kinematic diagram is drawn. And, in the kinematic diagram, the X axes are all lined up. But, try to imagine what will happen as Theta1 changes value. As that first joint moves, X1 will change direction so that it is no longer lined up with X0. For example, when Theta1 is 90 degrees, X1 will line up with Y0, not X0. Having Theta1 in the table in the Theta column is what accounts for this.
Positive a2 and a3 are correct here, but I definitely understand why this is confusing. Let me try to explain: First, draw an arrow (vector) going FROM the center of the 0 frame TO the center of the 1 frame. When you look at the component of this vector that is in the X1 direction, that arrow will have a magnitude of a2, and it will be pointing to the right, in the SAME direction as X1. That's why a2 should be positive here. If that vector component was pointing in the OPPOSITE direction as X1, then it would be negative. For example, suppose we had drawn X1 to the left instead of to the right (and Y1 coming out of the page). In that case, the direction of X1 would be opposite the direction of the displacement FROM the center of frame 0 TO the center of frame 1, and so in that case the a2 would be negative.
No, it is positive. Let me try to explain why: in each row of the table, we are writing the distance FROM the n-1 frame TO the n frame in the direction of a particular axis. And, 'n' is the number in the first column of the table. So, when we are writing the value of r in the first row of the table (at 21:36), n=1 so we are thinking to ourselves, "What is the distance FROM frame 0 TO frame 1, measured in the X1 direction?" The distance FROM frame 0 TO frame 1 is going left-to-right (try drawing an arrow that points from the center of frame 0 to the center of frame 1. It points up and to the right.). Since X1 is also pointing to the right, that's why the value of r here is positive.
Sorry - which software for what? Here are some software packages I use for different things: I use Camtasia for making videos. I use Python for doing calculations and machine vision (open cv with Python). I use PSoC Creator to program microcontrollers to control the robot itself.
Hi Angela, Just a question on the links on the mini-quiz on mark 16:05. does the link between a2 and a3 (the z-height) doesnt have to be included in the diagram? In the previous videos (ua-cam.com/video/osC-cuCxn1U/v-deo.htmlm54s) this z-height seems to have been considered and included... Great videos by the way... Thanks!
It depends upon the actual (physical) manipulator that the drawing was made from. Sometimes, we draw in links that aren't phyisically in the manipulator just to make it easier to draw. In this case, we can either label the link and later set the value of the variable to zero, or we can skip labeling it altogether. In this example, I didn't give the students the physical manipulator, I just gave them the drawing (the kinematic diagram). I had already decided to skip labeling that link that was not physically present in the manipulator.
Awesome! I was drawing up the kinematic diagram from the joints myself when I found out I had an extra link. Thanks for the videos again and Happy new year! Edit: I just realized you mentioned about this link on the latter part of the video. I commented too soon :D
hello ma'am, i still dont understand for the theta part. why there's still theta for row 1 , and for the row 3 theta = 0, when the frame 0 -> frame 1 and frame 2->frame 3 has the same direction? (example no.2) REPLY
Hi Nadia, The theta parameter needs to include two things which we add together: (1) rotation around Zn-1 needed to get Xn-1 to point in the same direction as Xn and (2) rotation around Zn-1 due to the joint. In the first row, X0 already is in the same direction as X1, so there is 0 theta component due to (1). But, the joint is a rotational joint that rotates Theta1 amount around Z0. So, there is Theta1 amount of rotation due to (2). Thus, the theta parameter for the first row is 0+Theta1 or just Theta1. In the second row, X1 already is in the same direction as X2, so there is 0 theta component due to (1). But, the joint is a rotational joint that rotates Theta2 amount around Z1. So, there is Theta2 amount of rotation due to (2). Thus, the theta parameter for the second row is 0+Theta2 or just Theta2. In the third row, X2 already is in the same direction as X3, so there is 0 theta component due to (1). Also, the joint is a prismatic joint that has only linear motion, no rotational motion. So, there is 0 theta component due to (2). Thus, the theta parameter for the third row is 0+0 or just 0.
Hello Ma'am, thank you for replying my question :). I'm sorry but i still have questions. What i get from the explanation for point (2) is that every cylinder shape must have rotation around the Z-axis. Does it right ma'am? And If i have a quiz, does the rotation around the Z-axis will be given along with the problem as a hint to solve the problem (like blue arrow drawing) or we have to determine by ourselves?
Yes, the 'cylinder shape' is a revolute axis, like a dc motor. So, every one has a joint variable that is rotational. Have you watched the other videos that come before this one in this playlist? If not, it may help you to do that. I have no way of knowing what your quizzes will cover, unless you are in my class. You need to ask your own teacher/professor what your quizzes will cover.
Im Patrick Pozon and my prof Dr. Noorani is killing me with this long ass video. I would rather watch the grass grow. I WANNA JUMP OUT THE WINDOW. 5:18 pm on 2/5/2020
Perhaps you should try eating some pancakes while watching the video. With real honest-to-goodness maple syrup. Always makes me feel less like jumping out of a window. Sincerely, RoboGrok
@@asodemann3 I AM eating plenty of pancakes thank you very much! IHOP is my damn HOME and brings me JOY unlike this egregious D-H representation lecture that this incompetent nincompoop of a Robotics professor (Dr. Noorani) tortured me with! If you care so much about my window safety you would pin this comment!! Best regards, Patrick Pozon









5 years old but still the best youtube channel to learn about this stuff! Sad to see you stopped posting, I would love a lesson on screw theory
Thank you so much, these examples were perfect.
Set the Video Speed to 1.25, thank me later
1.5 works for me the best
@@MegaSuscribe 2 works for me the best
thank me later
@@MegaSuscribe 2 works for me the best
thank me later
@@yashverma8212 I passed my robotics exam but thanks haha
thanks man
Dear Angela, I really appreciate your tutorial. I found your course is extremely useful to beginners!! Countless love for the slow and patient explanation. And thanks to modern technology, the faster learners can apply 1.25 to 1.5 speed while beginners like me really enjoy the slow pace. Once again, thank you so much.
This is the best explanation of DH that I have seen on UA-cam.
No one could've explained it better. Kudos to you Angela ma'am!
After seeing at least 20 videos. I found here the best and to the point soln.
Thanks a agela you are real angel.
I am studying in Germany, I dont know why our teachers not explain like this . I really like this slow pace.
Dear Professor! .. Wonderfull explannation of D-H param...great help to robotics community
With due respect, you are making robotics beautiful.....one robotic joint at a time....keep it up...
you had done a great work and your dedication to explain things is awesome
thanks a lot
Thank you very much. This free content is very much appreciated.
WOW! Just wow! Your explanations are so clear to understand. Thank you so much for your effort.
What a great video. Thanks for your wonderful explanation. I have been struggling with the D-H representation and your video made it very clear for me.
the best viseo i saw about this DH, thank you very much, finally i can solve some problems
Far better than my professor. thanks for this video.
Thanks for saving our asses before exams :3
ya
I want your help in solving 2 robotic exercises
I learned a lot from your video,although i am not English native speaker.Thank you madam^^
First of all, thank you very much for your awesome videos. They've already helped me a lot.
Secondly: at 24:25, when finding the value for the third d, shouldn't the signal be negative since the distance between frames 3 and 4 will be decreasing when the prismatic motion happens? And I wonder if the same shouldn't happen between frames 2 and 3.
Thank you once more.
Thank you so much for all these videos. You've helped me a lot!!
thank you ma'am
i dont know why im paying heavy fees to my university
Uni chor do phir :D
I watched your 3 videos and I think I got the points and base knowledge about the topic. Thank you very much you explained everything clearly.
Great video, thank you for your work. My only nitpick is the background noise is a little distracting at parts. I kept thinking people were talking near me.
Thanks a million! Now, I understand this method better :)
Thank u so much for the information,thank u your video explanation I can undestand this topic that I don't undestand very well c:
you are perfectly understandable manner great teaching
thank you for sharing the knowledge, perfect
Thank you for teaching .
thank you so much, you are a wounderful teacher :D
Thank you so much!!
Why did my incompetent professor even try when he could've just showed us your videos lol
You are a gem
Thanks for making it clear.
it really help. Keep up the good work
Angela you are angle to me
theta or alpha ? :D
I have same thought yesterday ha
@@etakly3337 gamma radiation
hulk
Hi, great series of videos, I wish every teacher had such understanding of topic and ability to share it in so easily digestible form. I have a question about 27:30 , how exactly do we convert DH parameter table to HTM? Does this matrix always looks the same?
Yes, the HTM is the same always; the only thing that changes is the values of the parameters. Each row of the table produces one matrix, which you then multiply together at the end. For example, suppose you have a manipulator with two joint. You will have a table with two rows. Get H0_1 by plugging in the values from the first row of the table, then get H1_2 by plugging in the values from the second row, then get H0_2 by multiplying H0_1*H1_2.
nice ma'am....very helpful
Amazing Explaination!
Hello Angela,
Wonderfully illustrated and explained videos. I have a question, when drawing the kinematic diagram, should we include the end effector joints too, or just calculate the distance to the centre of end effector?
Off topic: Have you considered using ROS for programming robots and simulation?
Hi Angela Thx for Charing this wonderful knowledge with us.
Wonderful tutorial
20:35, When rotating around the x2 axis to match the frames 1 and 2, both positive and negative 180 degrees seems to indicate the same location. Would it be a problem to write -180 degrees?
No, it's not a problem. You will get the same answer with 180 and -180
For the first and second example shown....what is the joint notation schema of the robot ?? Is that are revolute joints (V) or rotational joints (R) ??? plss reply mam
amazing video!
the BEST
God bless you 🙏🏻💜
Hi Angela, 1st of all I really appreciate the course, it's very nice but I have one question about the second alpha, isn't it supposed to be negative because that 180 degrees seems to be negative from frame 1 to frame two of you rotate z
It should be positive because you are rotating it clockwise, you also need to align the Y1 with Y2. I hope this helps
@@Sibasish07 Yah, eventually I saw it, thanks
YOU are the best :)
Great job thank you so much
heaven sesnt,thank you
watch 1.5x play speed
Hi there, please could you paste a link to HTM part 1 can't seem to find it on here thank you
when we don't know distance from frames .then we can use inverse kinematics to find d & r in dh parameter ,Is this correct? and are there any other method
Hi Angela! Your videos have been amazing and have really helped me get a grasp on this topic. Thank you!
I just have a small doubt. For the parameter 'd' in row 1 (which is the distance in the Xn direction ) we found that the distance is a2. But as the joint variable theta1 rotates, the distance decreases in the Xn direction to a2cos(theta1). So shouldnt the parameter be written as a2cos(theta1) instead of a2?
The same doubt arises for the value r in row 2 also. Kindly help me resolve this
Please specify the timeline which robot are you talking about?
I think the DH Parameters are always considered in default Robot Pose
madam can you simply tell me, how i can get the c alpha and r ,bcz when I'm doing my hm transformation, i never encounter sort of this value, bundle of love for nice explanation overall,
Is there a timestamp in the video you are referring to?
Your lecture and explanation is superb. one question, as we are taking anticlockwise positive, isn't it -90 in first example explaining alpha. Hoping for your reply.
Alpha is the rotation around the X axis. For the first row, take your right hand and put your thumb in the direction of X1, which is pointing to the right. You should notice that your fingers are curling towards you. Now, Z0 is pointing up, but we need to get it to point in the same direction as Z1, which is pointing towards us. So, the direction we rotate the 0 frame is towards us, which is the same direction our fingers curl.
Another way to think of it is to imagine yourself standing and looking at the frames from the right, so that X1 is pointing directly at you. When you rotate the 0 frame, which direction do you rotate it to get Z0 to match Z1? You rotate it counter-clockwise, which is positive.
@@asodemann3 best. Cleared all the way. ZO has to be twisted in order to get into direction of z1. I was changing z1. Thanks a lot
@@asodemann3 Then we're matching the Zn-1 frame to the Zn frame and not the other way round ??? I imagined looking from both X1 and X0 to the YZ plane, respectively. When we described the alpha, we defined it so as to match the frames. This might confuse some people because there are two ways to match these two frames, one having 90 degrees of rotation around x and the other having -90 degrees.
Do we need to match from the preceding frame to the next frame?
Thanks for all the effort you put in to shed a light on the Robotics.
I want your help in solving 2 robotic exercises
Vielen vielen Dank
I understood most of it, just not why the first rotation is theta 1 when both coordinates are in the same position?
Theta 1 is the 'joint variable' - it represents how much that joint has turned as the robot moves around. So, even though the two frames are in the same position now (in the picture), they will not be later on when the robot has moved. Including the joint variables in our equations insures that our equations will still be true and valid no matter how the robot moves.
I dont understand why do we in the first example add Theta1 and Theta2 in the Theta column if the x axis are already lined up. Is it always the case if the x axis are lined up? Sorry for writing after four years.
The 'Theta' there accounts for the joint angle. In other words, the values of Theta1, Theta2, and so on are all 0 as the kinematic diagram is drawn. And, in the kinematic diagram, the X axes are all lined up. But, try to imagine what will happen as Theta1 changes value. As that first joint moves, X1 will change direction so that it is no longer lined up with X0. For example, when Theta1 is 90 degrees, X1 will line up with Y0, not X0. Having Theta1 in the table in the Theta column is what accounts for this.
thank you !!
perfect expaination
Thank u
The best 😇😇
Thankyou so much
Thank you
Thank you Mam. ! 😄
is there a negat,ve or positive turn for alpha?
thankyou so much mam ...
i think when we finding r's at SCARA manipulator, negative (-) sign should be added a2 and a3 21:46
Positive a2 and a3 are correct here, but I definitely understand why this is confusing. Let me try to explain: First, draw an arrow (vector) going FROM the center of the 0 frame TO the center of the 1 frame. When you look at the component of this vector that is in the X1 direction, that arrow will have a magnitude of a2, and it will be pointing to the right, in the SAME direction as X1. That's why a2 should be positive here. If that vector component was pointing in the OPPOSITE direction as X1, then it would be negative. For example, suppose we had drawn X1 to the left instead of to the right (and Y1 coming out of the page). In that case, the direction of X1 would be opposite the direction of the displacement FROM the center of frame 0 TO the center of frame 1, and so in that case the a2 would be negative.
@@asodemann3 i understand, thank you.
Thanks a lot
21:36 isn't the distance in the negative direction? since the positive x-axis is to the right and frame 0 is to the left? for a2
No, it is positive. Let me try to explain why: in each row of the table, we are writing the distance FROM the n-1 frame TO the n frame in the direction of a particular axis. And, 'n' is the number in the first column of the table. So, when we are writing the value of r in the first row of the table (at 21:36), n=1 so we are thinking to ourselves, "What is the distance FROM frame 0 TO frame 1, measured in the X1 direction?" The distance FROM frame 0 TO frame 1 is going left-to-right (try drawing an arrow that points from the center of frame 0 to the center of frame 1. It points up and to the right.). Since X1 is also pointing to the right, that's why the value of r here is positive.
@@asodemann3 Ah... that makes more sense! thanks, I understand now
thank you so much ..👍👍
is there any videoo for ...how to draw the above diagramm z1 ,z2 etc...???
Yes; you might want to check out my website, www.robogrok.com. It organizes the content as a sequence of lessons, like a class.
thank's a lot
Thank you mam
It helped.
U r great
Madam if the direction of x is different then how can we find theta???
Haroon Javaid
Look at the next cideo in the playlist: Denavit Hartenberg examples.
angela you are angel to me..
What if I have to rotate 2 axis to match Xn and Xn-1?
When you find Theta and Alpha all the axis rotations will match. Just try it out.
how do you assign frames to different joints?
ua-cam.com/video/ut4uZ6Yzv6o/v-deo.html
Woooooooooooooooooooow
Can you tell which software you use?
Sorry - which software for what? Here are some software packages I use for different things: I use Camtasia for making videos. I use Python for doing calculations and machine vision (open cv with Python). I use PSoC Creator to program microcontrollers to control the robot itself.
Hi Angela,
Just a question on the links on the mini-quiz on mark 16:05. does the link between a2 and a3 (the z-height)
doesnt have to be included in the diagram?
In the previous videos (ua-cam.com/video/osC-cuCxn1U/v-deo.htmlm54s) this z-height seems to have been considered and included...
Great videos by the way... Thanks!
It depends upon the actual (physical) manipulator that the drawing was made from. Sometimes, we draw in links that aren't phyisically in the manipulator just to make it easier to draw. In this case, we can either label the link and later set the value of the variable to zero, or we can skip labeling it altogether. In this example, I didn't give the students the physical manipulator, I just gave them the drawing (the kinematic diagram). I had already decided to skip labeling that link that was not physically present in the manipulator.
Awesome! I was drawing up the kinematic diagram from the joints myself when I found out I had an extra link. Thanks for the videos again and Happy new year!
Edit: I just realized you mentioned about this link on the latter part of the video. I commented too soon :D
25:07 o wow
hello ma'am, i still dont understand for the theta part. why there's still theta for row 1 , and for the row 3 theta = 0, when the frame 0 -> frame 1 and frame 2->frame 3 has the same direction? (example no.2)
REPLY
Hi Nadia,
The theta parameter needs to include two things which we add together: (1) rotation around Zn-1 needed to get Xn-1 to point in the same direction as Xn and (2) rotation around Zn-1 due to the joint.
In the first row, X0 already is in the same direction as X1, so there is 0 theta component due to (1). But, the joint is a rotational joint that rotates Theta1 amount around Z0. So, there is Theta1 amount of rotation due to (2). Thus, the theta parameter for the first row is 0+Theta1 or just Theta1.
In the second row, X1 already is in the same direction as X2, so there is 0 theta component due to (1). But, the joint is a rotational joint that rotates Theta2 amount around Z1. So, there is Theta2 amount of rotation due to (2). Thus, the theta parameter for the second row is 0+Theta2 or just Theta2.
In the third row, X2 already is in the same direction as X3, so there is 0 theta component due to (1). Also, the joint is a prismatic joint that has only linear motion, no rotational motion.
So, there is 0 theta component due to (2). Thus, the theta parameter for the third row is 0+0 or just 0.
Hello Ma'am, thank you for replying my question :). I'm sorry but i still have questions.
What i get from the explanation for point (2) is that every cylinder shape must have rotation around the Z-axis. Does it right ma'am?
And If i have a quiz, does the rotation around the Z-axis will be given along with the problem as a hint to solve the problem (like blue arrow drawing) or we have to determine by ourselves?
Yes, the 'cylinder shape' is a revolute axis, like a dc motor. So, every one has a joint variable that is rotational. Have you watched the other videos that come before this one in this playlist? If not, it may help you to do that.
I have no way of knowing what your quizzes will cover, unless you are in my class. You need to ask your own teacher/professor what your quizzes will cover.
Angela Sodemann Thank you so much Ma'am for the explanation, and your videos really help me to understand the subject :)
Im Patrick Pozon and my prof Dr. Noorani is killing me with this long ass video. I would rather watch the grass grow. I WANNA JUMP OUT THE WINDOW. 5:18 pm on 2/5/2020
That super disrespectful to your professor. He is trying to teach you something
Perhaps you should try eating some pancakes while watching the video. With real honest-to-goodness maple syrup. Always makes me feel less like jumping out of a window.
Sincerely,
RoboGrok
@@asodemann3 I AM eating plenty of pancakes thank you very much! IHOP is my damn HOME and brings me JOY unlike this egregious D-H representation lecture that this incompetent nincompoop of a Robotics professor (Dr. Noorani) tortured me with! If you care so much about my window safety you would pin this comment!!
Best regards,
Patrick Pozon
When you get lost in between slowness and forget why you were watching it....
Jani speed 1.25 krdo
shut up
12:26
6:26
How the cylinder tranformed to the box shitttt
This is a really good video but ur handwriting needs to be a lot better aha. Or maybe include animations to illustrate the point better.