MultiCol-SLAM with loop closing and re-localization

Вставка
- Опубліковано 14 жов 2024
- The code is available here: github.com/urb...
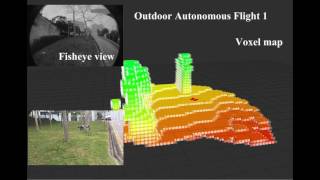
This video demonstrates MultiCol-SLAM a multi-camera SLAM framework.
It is originally based on ORB-SLAM and capable of performing tracking, mapping, loop closing and re-localization for arbitrarily coupled multi-camera systems.
It works with different central cameras (perspective, fisheye, omnidirectional).








Do you synchronize the output of multiple cameras ?
We used hardware synchronized cameras in the experiments.