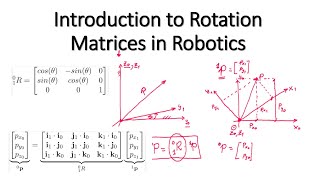
Modern Robotics, Chapter 3.2.1: Rotation Matrices (Part 1 of 2)

Вставка
- Опубліковано 29 вер 2024
- This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and Control," by Kevin Lynch and Frank Park, Cambridge University Press 2017. See modernrobotics.org for information on the book, free software, and other materials.
This video introduces the space of rotation matrices SO(3), a Lie group, and properties of rotation matrices.
This video is a brief summary of material from the book, and it is not meant to stand alone. For more details, such as an explanation of the notation, please consult the book and the other videos.
Playlist for Chapter 3: • Modern Robotics, Chapt...
Playlist for all book videos: • Modern Robotics, All V...
UA-cam channel with all playlists: / kevinl2145
Wiki for the book, including software and other supplements: modernrobotics.org
Modern Robotics is now a series of online courses on Coursera! www.coursera.o...







Professor Lynch is very good at explaining, I wonder what will happen if he makes fulltime lectures on these
Thanks
Quaternions and geometric algebra?
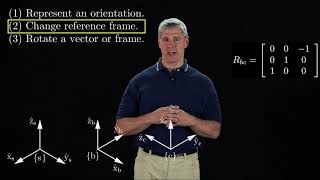
How did you obtain matrices xb, yb, zb wrt s frame?? mentioned at 45sec of the video.
For xb find orientation of xb as a unit vector in s frame , xb vector is in Ys direction in s frame , and the X's and Zs are zero for xb unit vector in S frame.
You should learn about linear transformations in linear algebra
@@lightyagmi4925 thanks