Hexapod MK2 - Inverse Kinematics

Вставка
- Опубліковано 24 лип 2024
- This video shows how I developed the inverse kinematic model required to move my hexapod in cartesian space.
I also developed a first walking sequence achieving the first steps of my hexapod.
GitHub: github.com/PhilippSchulzGit/H...
Chapters:
0:00 Greeting, Recap And Goal Of The Video
0:37 Requirements
1:05 Design Of Concept
9:50 Realization
10:25 Tests
12:36 Conclusion And Outlook
13:34 Last Words - Наука та технологія

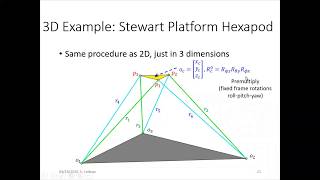






Do you still have what your DH table looks like?
is it in matlab or python/ which plugin is used for such locators
The simulation is written in Python by using numpy and matplotlib. You can find the code in the GitHub linked in the description, under the folder "Inverse Kinematics" -> "Programs" -> "Python". Its the "ikm_simulator_v1.py" script. Happy experimenting!