Well done sir! Thank you very much. Very succinct. I played this at 1.5x speed to cram for a test instead of reading the book for an hour. YOU ARE THE MAN!
Jesus Christ you explained what my TA couldn't in less than 5 minutes. I've a pretty good sense of Linear algebra but you just explained it so elegantly.
Fantastic video. You don't baby your audience walking through how to do every basic step and get to the meat of the the topic which brings people to your video. Thanks much.
Thank you very much for the vid it's really well explained. But am I the only one who got different values for Landa ( equals -5) at 2:42 ? I calculated | Landa*I _ A| . "A " stands for our matrix (4 -3, 6 -7) please correct if I'm wrong :)
thanks so much dear Dr for this brief and at the same time comprehensive lecture. I'm new at this subject and studying on my own, so it was really cleared it out for me. Just a little question: critical points must be real or else it wouldn't be linear anymore. Am I right?
Well, I'm assuming here that x(t), y(t) are real functions, in which case a non-real critical point should be interpreted as the absence of a critical point. But I don't think that connects to linearity - even non-linear systems will have real critical points.
Hi and thanks a lot for your help! My problem is the following: I would like to draw a phase diagram for a system of 3 differential equations And it has three parameters
great video! but we just had an example where both lambdas are positive & real and still we got an saddle point. y_1' = 2*y_1 - y_2 y_2' = -y_1 + 2*y_2 lambda_1 = 3 lambda_2 = 1 could u maybe explain that?
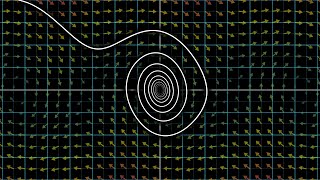
Hello sir,Could u pls help me to know in case of complex eigen value with with negative real part we have trajectories in the form of decaying spiral but how to know they are clockwise or anticlockwise
Hello Dr. Underwood , Thanks for the lecture . I was wondering if you could answer a small doubt I had . I came across plot which involve real part Vs Imaginary part of eigen values in a CFD problem . What can I comment when i look at the change in origin of Real/Imaginary part based on change in flow parameter. If possible provide me with some reference. Thank you in advance !
Hi +Rajat Hebbare , I'm not sure I quite understand the question. What do you mean by "change in origin of Real/Imaginary part"? What about the origin is changing? I suppose you're referring to some system of linearized Navier-Stokes equations? Under what approximation are you working?
Thanks a lot! I'd like to ask a question, when you have roots that are both real and both positive or negative, so they're both growing/decaying solutions and you end up having parabolas that are at a tangent to one of the manifolds and are vertical to the other manifold, how do you know which one it is vertical/horizontal to?
***** Hi! Thanks for your question, though I'm not sure I completely understand what you're asking. What I think you're asking is what if you have a system with two positive real eigenvalues, like: x' = 4x - y y' = 6y-3x which has eigenvalues +7 and +3. In this case, the phase diagram will not have parabola-shaped trajectories, but instead will have trajectories pointing outward from the origin, since all solutions grow away from the origin due to the positive eigenvalues, as in the "Unstable Node" diagram in the video.
Dr. Underwood's Physics UA-cam Page Thanks for your (speedy) reply! I understand that, but you know the parabola-shaped trajectories, they will go along one of the lines and be at a tangent to one of the other lines right? So you get something that looks like an X with parabolas on either side of one line - they are at a tangent to this line - and this means the parabolas will be inline/parallel almost to the other line. I'm asking how you know where to draw the parabolas, I know they reflect each other and I know what direction to put the arrows on, but how do you determine which side of the "X" to actually place them on? Does that make more sense? Really appreciate your help Dr. Underwood, thanks a lot!
Hi Talha - there are two types of stability: one, where a trajectory stays "nearby" a point (or orbit), and another, where a trajectory converges to a point (or orbit). We refer to the latter as either "attractive" or "asymptotically stable" - they mean the same thing. Hope that helps!
Sure - if you use "source" or "stable attractive node", everyone will know what you're talking about (same with "sink"). Just note that there is a difference between a "stable attractive node", and just a "stable node". I don't think you want to call them both "source" - that obscures an important difference between them.









Well done sir! Thank you very much. Very succinct. I played this at 1.5x speed to cram for a test instead of reading the book for an hour. YOU ARE THE MAN!
MotoBoy ..if u do so.. The speech will be such u cant understand...
Jesus Christ you explained what my TA couldn't in less than 5 minutes. I've a pretty good sense of Linear algebra but you just explained it so elegantly.
The part with the types of Critical Points at 7:40 was the illumination I was looking for. Thank you for the great explanation!
Fantastic video. You don't baby your audience walking through how to do every basic step and get to the meat of the the topic which brings people to your video. Thanks much.
A very straightforward explanation without losing the listener by heavy calculations!
So concise and clear. Thanks so much, sir!
Thanks. I was looking for this topic. God bless u
thanks so much for this. It really brought a lot of concepts I've been learning at uni together :)
+Vanessa Ikebudu Thanks Vanessa! I'm glad it was useful!
Thank you very much. This helped me for my exam preparation.
Really great way to explain phase plane. I was struggling abit but this made it really simple
I have a test tomorrow and this was really helpful, Thanks!! :)
Excellent video!
Thank you very much for the vid it's really well explained. But am I the only one who got different values for Landa ( equals -5) at 2:42 ?
I calculated | Landa*I _ A| . "A " stands for our matrix (4 -3, 6 -7) please correct if I'm wrong :)
truly my lifesaver, thanks a lot sir
thanks so much dear Dr for this brief and at the same time comprehensive lecture. I'm new at this subject and studying on my own, so it was really cleared it out for me. Just a little question: critical points must be real or else it wouldn't be linear anymore. Am I right?
Well, I'm assuming here that x(t), y(t) are real functions, in which case a non-real critical point should be interpreted as the absence of a critical point. But I don't think that connects to linearity - even non-linear systems will have real critical points.
Hi and thanks a lot for your help! My problem is the following: I would like to draw a phase diagram for a system of 3 differential equations And it has three parameters
Thanks for explanation Dr. Underwood.
Can you elaborate on 6:12 ... i still dont understand how it tends to the right.
great video! but we just had an example where both lambdas are positive & real and still we got an saddle point.
y_1' = 2*y_1 - y_2
y_2' = -y_1 + 2*y_2
lambda_1 = 3
lambda_2 = 1
could u maybe explain that?
I am still a little confused as to why the phase plane has a clockwise rotation at 6:20. Anybody have any further explanations?
THANK YOU SO MUCH !!!!!!!! I THINK YOU MAY HAVE SAVED MY LIFE
Hi and thanks a lot for your help! My problem is the following: I would like to draw a phase portrait for a system of 3 differential equations.
AWESOME!!!!!!!! Super efficient teaching!
Very well done and fast explanation thanks!
Sir, how do we get to know when the eigenvalues are imaginary then the phase curve would be rotational?
Thanks Sophie and Krishan!
Thank you so much.I hope i pass my DE exams
Hello sir,Could u pls help me to know in case of complex eigen value with with negative real part we have trajectories in the form of decaying spiral but how to know they are clockwise or anticlockwise
For the solution to eigenvalue of -5, shouldn't the line be x=3y or y=1/3x?
Thanks for this! Saved my life. :D
I am enlightened.
Eigenlightened!
can we draw phase potrait for four order differential euation by converting it in first order system differential of equations in mathematica
Thank you so much! My professor and textbook made this seem so complicated.
True
Thank you so much, what a great video!
Hello Dr. Underwood , Thanks for the lecture . I was wondering if you could answer a small doubt I had . I came across plot which involve real part Vs Imaginary part of eigen values in a CFD problem . What can I comment when i look at the change in origin of Real/Imaginary part based on change in flow parameter. If possible provide me with some reference. Thank you in advance !
Hi +Rajat Hebbare , I'm not sure I quite understand the question.
What do you mean by "change in origin of Real/Imaginary part"? What about the origin is changing?
I suppose you're referring to some system of linearized Navier-Stokes equations? Under what approximation are you working?
Hello sir. Thank you for your videos. Could you please tell me which software were you using to write?
+RAMANISH SINGH Thanks! I use Camtasia Studio to do the screen recordings. The notes themselves are written on OneNote.
Thank you sir.
Great teaching!!
thanks Dr you made it clear for me now , tomorrow exam :)
fanatstic explanation
Thanks you verry much!
Thanks a lot! I'd like to ask a question, when you have roots that are both real and both positive or negative, so they're both growing/decaying solutions and you end up having parabolas that are at a tangent to one of the manifolds and are vertical to the other manifold, how do you know which one it is vertical/horizontal to?
***** Hi! Thanks for your question, though I'm not sure I completely understand what you're asking.
What I think you're asking is what if you have a system with two positive real eigenvalues, like:
x' = 4x - y
y' = 6y-3x
which has eigenvalues +7 and +3.
In this case, the phase diagram will not have parabola-shaped trajectories, but instead will have trajectories pointing outward from the origin, since all solutions grow away from the origin due to the positive eigenvalues, as in the "Unstable Node" diagram in the video.
Dr. Underwood's Physics UA-cam Page Thanks for your (speedy) reply! I understand that, but you know the parabola-shaped trajectories, they will go along one of the lines and be at a tangent to one of the other lines right?
So you get something that looks like an X with parabolas on either side of one line - they are at a tangent to this line - and this means the parabolas will be inline/parallel almost to the other line.
I'm asking how you know where to draw the parabolas, I know they reflect each other and I know what direction to put the arrows on, but how do you determine which side of the "X" to actually place them on? Does that make more sense?
Really appreciate your help Dr. Underwood, thanks a lot!
Thanks so much, very very helpful!!
Can't thank you enough sir!
I must just be missing something but I have no idea why the clockwise rotation occurs, the rest is ok though. Thank you for the video :)
you are the best!! thanks a lot sir!!
best explanation!!!
thank you!
Great explanation mate!
gooD explanation.....
Thank you ,very clear!
Thank you sir
Fantastic you're intelligent
At 9:17 wont the stable attractive point be asymptotically stable?
Hi Talha - there are two types of stability: one, where a trajectory stays "nearby" a point (or orbit), and another, where a trajectory converges to a point (or orbit). We refer to the latter as either "attractive" or "asymptotically stable" - they mean the same thing. Hope that helps!
Dr. Underwood's Physics UA-cam Page ahhh got it! Thanks a lot Dr. Underwood
Thank you very much!
Can you help please
How classification of critical points of system in three equation in 3d
thank you
What if eigenvalues are coincident and comes zero ?
How to find Equil Phase Portrait of three (x,y,z)
Thanks sir
crisp explanation.. :)
amazing
thanks for you
Can you help please
my proplem classification of critical points of system in three equation in 3d
thank u sir,,
thank you so much
nice and easy
omg you're the best thank you
huge thanks for that....
respect sir
I thought stable points were called "sinks" and unstable points were called "sources"?
Sure - if you use "source" or "stable attractive node", everyone will know what you're talking about (same with "sink"). Just note that there is a difference between a "stable attractive node", and just a "stable node". I don't think you want to call them both "source" - that obscures an important difference between them.
Okay. Thanks for the clarification!
thanks
good introduction - amarjit advocate delhi high court -india
Careful, the eigenvalues for that matrix are incorrect, should be 5 & -2
I love you
:)
hi from IZTECH xd
Thank you so much!