Excelente video realmente me quedó bastante claro, ya llevaba horas buscando un video que lo explicara bien y el destino me llevó aquí, agradezco tu buena explicación.
Gracias por el vídeo, me sirvió muchísimo, estos problemas me pasaron alguna vez y no sabia la razón de porque pasaba, ya se que lo mejor es usar quaternions y evitar dolores de cabeza.
Buenas tardes. Excelente explicación. Tengo una observación sobre la matriz de rotación en y: los signos de la función seno son contrarios. Gracias por su aporte.
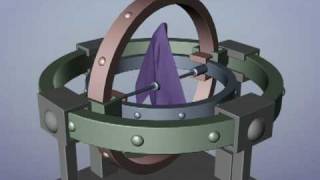
Buenas noches. Excelente explicación. Podría orientarme con cuál software realizó la simulación del cubo y los ejes coordenados usando transformación matricial y cuaternions para mostrar el efecto y correction de gimbal lock? Gracias por adelantado.
Las transformaciones de coordenadas cambian los marcos de referencia (osea, el origen y ejes, lo que se ve en el video), mientras que los números complejos y cuaterniones rotan vectores sólo por multiplicar, no hay cambios de coordenadas. Por eso los cuaterniones no rotan los ejes.
8:18 Es que no es lo mismo el eje z local que el eje z global. Eso hay que aclararlo. Y la aclaración es que los hamiltonianos referencian un sistema GLOBAL de coordenadas y también sobre un sistema LOCAL. Los angulos de Euler son un completo despropósito tal y como hoy se usan porque se saltan a la torera la localidad y la globalidad del sistema referencial.
Buen video, si bien, el concepto de "gimbal lock" o bloqueo del cardano, no es eso exactamente, sino que lo que explicas es LA CAUSA matemáticamente explicada del llamado "gimbal lock".
Los Cuaternarios son críticos y fundamentales en todo tipo de navegación porque en definitiva te estas posicionando en espacio y tiempo. ya seas un submarino, torpedo, avión, Drones y todos los vehículos no tripulados, la orientación de sus cámaras y resto de sensores. y como se relacionan con su entorno. Te doy un ejemplo muy simple.... Cuanto en un dron pulsas el botón Follow estableces tomas guardas un Tensor formado por varios Cuaternarios que calcula la distancia entre los GPS, las orientación con respecto a su brújula y como están orientadas sus cámaras además todo el entorno de compensación de derivas y inercias. con todo eso y un poquito mas un dron puede hacer un seguimiento y es muy similar el algoritmo como y porque puede regresar solo al punto de partida si pierde señal con la base. En los submarinos es similar. Si necesitas mas información para algo mucho mas especifico puedes escribirme a lab.argostau@gmail.com
Para tratar de avanzar en ese campo, Hamilton trató de estudiar lo que llamó la "Teoría de las Tripletas", números hipercomplejos referidos al espacio tridimensional del mismo modo que los números complejos se referían al espacio de dos dimensiones. Fue aquello lo que le llevó al descubrimiento de los cuaterniones.









Por fin alguien lo explica en español!
Excelente video realmente me quedó bastante claro, ya llevaba horas buscando un video que lo explicara bien y el destino me llevó aquí, agradezco tu buena explicación.
Muchas gracias por tu explicación, super práctica y muy profesional !!! Felicitaciones !!
Estoy muy emocionado por ver el vídeo de la implementación de rotaciones con cuaterniones.
😊 gracias por la explicación Dios te bendiga 😊😊😊😊❤
Excelente explicación, muchas gracias por tu tiempo y por explicar este tema de forma sencilla y cercana.
Excelente explicación. Me ayudó a mejorar mi entendimiento del tema. Gracias!
Muy buena explicación señor.
Me encantó el vídeo. Actualmente estoy trabajando con unity como hobby y me ayudaste mucho la verdad, te doy las gracias.
Gran explicación te felicito
Sube el video explicando los cuaternions plz, excelente video!!!!
Gracias por el vídeo, me sirvió muchísimo, estos problemas me pasaron alguna vez y no sabia la razón de porque pasaba, ya se que lo mejor es usar quaternions y evitar dolores de cabeza.
Buenas tardes. Excelente explicación. Tengo una observación sobre la matriz de rotación en y: los signos de la función seno son contrarios. Gracias por su aporte.
Muchas graciassss. Resolviste varias dudas que tenia.
Muchas gracias por la explicacion maestro saludos
Buenas noches. Excelente explicación. Podría orientarme con cuál software realizó la simulación del cubo y los ejes coordenados usando transformación matricial y cuaternions para mostrar el efecto y correction de gimbal lock?
Gracias por adelantado.
Las transformaciones de coordenadas cambian los marcos de referencia (osea, el origen y ejes, lo que se ve en el video), mientras que los números complejos y cuaterniones rotan vectores sólo por multiplicar, no hay cambios de coordenadas. Por eso los cuaterniones no rotan los ejes.
Tremenda explicación papá, saludos.
Hermano, tu vídeo va a la bibliografía de mi trabajo xD
oh no... xD
mejor explicado imposible
excelente, felicitaciones
Es como rotar en modo local?
Excelente explicación!
Muy interesante
No lo hiciste al video explicando?
Me gusto este, gracias!
Esta pendiente tu video de la explicacion de los cuaternios.
gracias por la explicación
8:18
Es que no es lo mismo el eje z local que el eje z global.
Eso hay que aclararlo.
Y la aclaración es que los hamiltonianos referencian un sistema GLOBAL de coordenadas y también sobre un sistema LOCAL.
Los angulos de Euler son un completo despropósito tal y como hoy se usan porque se saltan a la torera la localidad y la globalidad del sistema referencial.
excelente video!! nuevo sub.
excelente!
Gracias.
Hola, que programa utilizas para hacer la simulacion de los ejes de coordenadas?
Muchas gracias
Sigues vivo bro? Excelente video, muchas gracias.
Excelente video... 👌👍
Buen video, si bien, el concepto de "gimbal lock" o bloqueo del cardano, no es eso exactamente, sino que lo que explicas es LA CAUSA matemáticamente explicada del llamado "gimbal lock".
Te amo
que aplicacion tienen los cuaternios en los submarinos??
Los Cuaternarios son críticos y fundamentales en todo tipo de navegación porque en definitiva te estas posicionando en espacio y tiempo. ya seas un submarino, torpedo, avión, Drones y todos los vehículos no tripulados, la orientación de sus cámaras y resto de sensores. y como se relacionan con su entorno. Te doy un ejemplo muy simple.... Cuanto en un dron pulsas el botón Follow estableces tomas guardas un Tensor formado por varios Cuaternarios que calcula la distancia entre los GPS, las orientación con respecto a su brújula y como están orientadas sus cámaras además todo el entorno de compensación de derivas y inercias. con todo eso y un poquito mas un dron puede hacer un seguimiento y es muy similar el algoritmo como y porque puede regresar solo al punto de partida si pierde señal con la base.
En los submarinos es similar. Si necesitas mas información para algo mucho mas especifico puedes escribirme a lab.argostau@gmail.com
En ningun video que he visto explican que es el parametro W... Que representa en el vector.
Muy pocos canales se atreven a hablar de este tema en español (incluido el mío)
Interesante canal, voy a echarle un vistazo en estos días :) Saludos!
jucarave llegué a tu canal por las analíticas de UA-cam...
Interesante, gracias por el aviso
No entendi
Está mal tu matriz de rotación en Y
Para tratar de avanzar en ese campo, Hamilton trató de estudiar lo que llamó la "Teoría de las Tripletas", números hipercomplejos referidos al espacio tridimensional del mismo modo que los números complejos se referían al espacio de dos dimensiones. Fue aquello lo que le llevó al descubrimiento de los cuaterniones.
Gracias x la explicación
Gracias por comentar