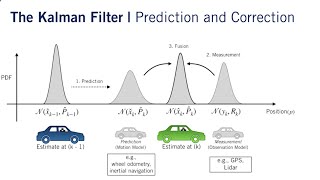
Navigation Kalman Filter with Accelerometer, Gyroscope and GPS

Вставка
- Опубліковано 13 жов 2024
- The combination of low-cost MEMS inertial sensors (mainly accelerometer and gyroscope) with a low-cost single frequency GPS receiver (u-blox 6T) is shown in this video. The sensors are all in a single box with a GPS antenna. The Kalman filter runs on an ARM microcontroller, the calculated position and orientation of the box is visualized on a laptop in a OpenGL application as a cube.
System design and implementation: Jan Zwiener
Video recording and editing: Axel Lorenz
Sensor box: teXXmo GmbH




![[UA] NAVI vs MOUZ | BO5 | IEM Rio 2024](http://i.ytimg.com/vi/CMBYk0cbGoA/mqdefault.jpg)


This is very impressive! Is this a commercial product? Do you have any documentation on your algorithms? I'm trying to do something similar for a personal project and you seemed to have done it extremely well!
Do you have any more info on this project somewhere? E.g. what kind of Kalman filter you used (EKF, SR-EKF, ...?), the sampling rate, the dimension and meaning of the state vector, your process noise assumptions, the speed of the ARM MCU. Did it have a floating point unit? What was the CPU load for the filter?
Grüße aus Göttingen
Hello, recently I have been making a drone localization system using Kalman filter. And all I know is the questions that you have mentioned. Did you got any solutions?
This work deserves a high ranking paper.
hello,
Does anyone have any information on how this works ? This is the best low-cost navigation system I've seen.
Great Job
Hello, did you find any answer from anywhere else?
Do you guys have a publication or paper documenting your work?
now .Have you ?
I could not find, if you found share the link please
This is so cool. Would love to see any paper on its design if you've published any.
it is great project, Does it compatible with Arduino uno. I can connect it with 4 motors. it will be great using it for my mini drone
Do you have a publication or example code?
Really impressive work that you had done. Please share repository link I want to try this.
Why do you need the gps? Isn’t enough accel and gyro for small tracking? Like indoor?
I'm at the hska too, and if i recognize that box correct it should work globally. So it gives an estimate about the exact position and orientation on earth.
Hi Jan, any publication / software demo about this?
Is it for sale or educational purposes.
In case you can provide us the way of connecting all together. It ill be great favor. I am working in similar project. Share just the code please
هل فهمت ذلك ، أعتقد أنه يمكنني مساعدتك
@@EriccoInertialsystemhow can you help you.
Could you provide email or mobile number.
Sir can you please help me by sending the hardware and software code that you have used to implement this
Hi Jan, I am doing the similiar research project, I just get data from the 6 axis from acc and gyro, I try to make the tracking. But I do not know how to get the displacement. May I get some guide from you?
you need to integrate the accelerometer data and apply high pass filter to remove drift. then integrate again to get displacement and apply high pass filter again to remove drift.
Hey, assuming you don't know in each position you are starting the box, can you figure it out by using only the sensors? In your video the initial position is known, the box is in a flat position pointing forward. I want to figure out its start position in a random situation. Best,
That's the billion dollar question
Yes, accelerometer (assuming not moving) and gps give the ground truth
I think gps module only measure position not high of object. How do you measure it?
He is using a barometer to get the height
Awesome sensor fusion.
Hi, I use kalman filter and Accelerometer and Gyroscope to get orientation, but I can not get right postion or movement just by acclerometer ,it always flips .In the video I see you use GPS but not move steps to get the up-down move . Can you give me some tips ?
@@allenxu1654 did they answer u ??? im really need it too
Hello, any update?
Anyone know how he managed the 3D visualisation? That's something I can't get to work with mine
+1
same situation here. Did you find something?
Hi, I am working on something similar. Can you please suggest if I want to draw the 2D movement of the sensor/ the object associated with the sensor. I am using MPU6050 sensor.
Thanks
Same here, how are you going by far?
@@KbloTshi I am working on the sam as well.. Any leads so far?
Hello, same situation here. Did you guys find anything?
Is neccesary the GPS?.
What are the applicaction of this product?
it is not neccesary but you can use for connection
how can you know the angular position ?
Yuri Novais Araujo Accelerometers and gyroscope!
Hellow Sir.
What a nice video.
I am undergraduate studnet working on the Localization of mobile robot.
Since project started, I just finished understanding how kalman filter works.
Next, GPS and IMU(accelerometer and gyroscope and magetometer) should be fusion(?) in Kalman filter. But I don't know how to start.
Can I get some advice? (I already know to use IMU and GPS and can do programming somehow)
hey i was wondering i have taken project on INS on 9dof, can u help me somecoding, i will be very thankful to u.
Any chance we can buy a sample PCB (with the code) ?
I just built a similar system for my uav project. xyz 3d position tracking down to the mm or better + 3d rotation & angle data.
it took me a minute to figure out how to code it, but then I realized, its just basic physics.
I really need a better program for displaying 3d CSV data than SerialChart.
I'd be interested to hear about your method if you're willing to share!
Distance = Distance + (Change_in_Acceleration * Time_Taken)
***** , I am interested in the accuracy of 1 mm, over what distance can this be achieved?
Please contact me at 435-619-5333 to talk.
what is the latest update ?
Hey, I am working on something similar. I am not worried about the orientation but just need to draw the movement of the sensor in 2D. Please suggest me the steps. I am using MPU6050 sensor but doesn't know how to proceed further.
can i get the documents?
so cool.
Sir,
Even I have 6DOFSensor Stick IMU from Sparkfun and have Tiny GPS.But my working environment is in GPS denied areas. Can you please help on this please sir.
Waoooo, quiero saber mas de este proyecto.
Can you share the code? git
Hello. Can you send source code for me?
hahaha... yup
did you get the code? It will be very much appreciated if Jan or you can share the code. my email peteryfang@gmail.com. Many thanks :-)
can you u help me????????
please
Sorcery!