This is legit the scariest thing I've seen you build, only for the forces involved and how close your fingers were to the mass wheel. Super informative!
thankfully these were solid brake discs, dangerous but not likely to fragment on falling and being unventilated they really have no protrusions to speak of
Stay safe, James. Those flywheels have a lot of energy in them and if that rocked off the table and hit the floor your plastic joints are going to give way and those flywheels are dumping all their energy into getting the heck out of there. Don't be in the way when they do.
I must second this. James, invest in or manufacture yourself a substantial safety shield before you do further experimentation with this. Those flywheels will not stop if they hit you.
Every machine should have an e-stop too. It seems he is just driving the motors directly from the receiver output so to stop the motors he needs to turn the knob down. It should be done like drones with an arming switch so the propellers won’t switch on without the switch turned on and will switch off as soon as the switch is turned off, preferably with braking.
You should print sheaths, or at least covers to the rotating disks. As is, you're one balance mishap away from losing fingers, especially since every time it falls, you reach for it with bare hands...
@@Shit_I_Missed. Gloves are a bad idea when working with rotating machines. The idea is that an abrasion is preferable compared to having the gloves being pulled in.
Lol don’t print them, get 1/4” thick clear polycarbonate sheet NOT ACRYLIC and thick metal corners then bolt it together. Only reason you probably don’t need thicker is those discs are smooth and solid metal incapable of fracturing under the rotational load applied.
A tether from the top of the unit to a strong fixed point above during testing will prevent dangerous devices like this tipping over. A mercury (for simplicity) tilt switch to cut power on toppling and automatic brake pads are also an idea. Explosive activated pads used on Sawstop table saws offers the best protection, but are expensive. Cheaper than sewing fingers back on though. ;)
It already has an IMU, the tilt detection could be done a lot better than using a mercury tilt switch. Perhaps the biggest error is that the flywheels seem to be directly controlled by that knob on the controller. It should at least be done like drones do it with a separate arming switch. In an emergency flicking a switch is much faster than turning a knob and it is also more definite, it is either on or off, there is no potential for it to be almost off.
The video game one reminds me more of the reaction wheel demos with the cube that can 'jump' up to it's side then to a corner. I guess the ideal one would be three big reaction wheels for crude correction and three smaller gyros for fine control? But for now, I'm going to enjoy watching the somewhat scary device you have made. :)
eh the mounting holes aren't what take the load anyway they're there to hold the disc in place when there's no wheel, the way it's supposed to be constrained is by face contact alone, the wheel studs just happen to pass through it but shouldn't really be doing any force transmission
@11:05 Bro put his hand on the thing and instantly realize and cut the speed! I say this shouldve been setup on the ground instead of a rickety table.. please be careful James
You can use reaction wheels as both a motive force and as a gyro (like you showed previously by balancing). Those little "dancing cube" robots do it where they use the wheels to fling themselves up then stand on end. Those usually have three wheels though, one for each axis. Maybe you could use some simple AI where it tweaks the PID values automatically to stabilize with various loads.
Car disk brakes are a great source, but, even better van rear disk brakes. They're slightly heavier, but, because the mass is centered around the band (because of the parking brake), the weight is even better distributed for a gyroscope. Ultimately tho, i think the best gyro you could make, that's sized and weight properly is a 20" bicycle wheel that has a banding of lead wrapped around. This is what we used back in school and it was super easy to make. At that time, we took lead sheets (the stuff used for meeting the roof of a house with the brick work) and wrapped them into a long "snake", which then got mashed into the 20" rim, which in then locked it into place because of the lips that usually hold the tire in place. We also secured it with a banding of steel, which cleverly put the locking tab on the size with the least weight, which in turn got our wheel nearly perfectly balanced without much work. To turn it, we used to use a fan motor with a locking clutch from a lawn mower.
I near had a heart attack when you dived for the moving unstable stabilizer. Would drum brakes work better for the gyro elements as they have a greater concentrated mass at the outer edge?
Your tightrope walking cheat device inspired me to build a toroid ring motor as a free-floating reaction wheel. Its not free floating, yet. But I think its got possibilities. As a satellite staibalizer maybe. no contact between the rotor and stator. And here the brake disks have alot of mass at low velocity near the centre, a toroid on spokes would make a much lighter machine with all the mass at one velocity. Love the channel, hope you have a holiday from this.
I wonder if two gyro wheels could be arranged lying down one above the other, like in the video but on its side, and each rotated on 2 axis synced together to balance for both pitch and roll at the same time.
The threaded holes you bolted up to are for threading a bolt into to pop the rotor off of the wheel hub when removing it. That being their only function, they aren't as precisely placed as the lug holes or hub ring. So having used that as your mount point might be the source of your off center vibrations. Also a break shop should be able to balance your rotors for fairly cheap if you want to get better precision. Also using conical roller bearings rather than ball bearings would eliminate and play at the axle that may be contributing to vibration.
You have quite a habit of making your contemporaries look like absolute posers. Thanks for the thousandth time for sharing your ideas. I really can't say how many times I've gotten invaluable design inspiration from your builds. Usually simple problems that I've overthought and overengineered you've solved with one part. Have to say, when the gyro frame fell over and the flange on the esc landed right on the battery I got flashbacks. It's always the pointy bits.
Brake rotors are a good proof of concept, but their weight is distributed more towards the hub than the edge. Concentrating weight on the outer radius will increase the moment of inertia on those flywheels allowing you to use smaller diameter flywheel or a lighter flywheel for the same angular momentum.
Cool - you've made something legitimately terrifying there - well done(I think?) for reaching out to catch it with no fear of the energy in those spinning brake discs. Beware the interaction of steel brake disc and ceramic/stone kitchen floor tiles though!
11:04 I should just casually mention that reaching into openly spinning parts with lots of inertia like this can damage or rip your hand off. Even if this was a very human instinct/panic reaction you should not show it on youtube without a word of warning.
I love your brains brother....in strictly the most "bro-mantic" sense, of course. taking 2 things I absolutely LOVE ( TOTK & flywheels) and using them to make another thing I love (self balancing robots)....It's like you REALLY know your audience. never stop. ever.
I think you could make it self-righting pretty easily by just putting it on top of a hemispherical bottom (like on Weeble-Wobble toys) with a cylindrical extension at the top (so it could lie flat in the extremes)
You could build a large sausage-shaped enclosure (punch-bag?) that is attached to the gyroscope inside by springs to resist and absorb impacts (like a washing machine)
Scared the hell out of me when it fell over the first time. I really thought you were gonna grab the rotating gyro. Nice save. I've seen some footage from an old train that ran on a single track and balanced using gyros, in a time before microcontrollers. They used hydraulics coupled to the gyros to help compensate. It might be possible to do something similar with those pneumatic pistons that hold trunks or hoods open on cars.
I love seeing the progression you make from small to potential giant three legged robot. Seems the past colabs with Colin Furze are influencing you a lot. 😊😅
Given your base tripod, I would use ONE gyro, rotating in the horizontal plane with pitch/roll servos. Tipping it as appropriate, you should be able to use that single gyro to stabilize _both_ pitch and roll, without any unneeded yaw issues. You will also need to pay attention to the gyro position with an integral term, using the robot off-center moment to keep the gyro flat over the long term. But I believe that this would be considerably simpler than the monstrosity of multiple gyros and translation you appear to be planning. There is a basic problem at hand, namely that such a robot would be better controlled by leg force than position. That would support a controllable torque to precess the gyro to level when needed. But if you have _some_ spring constant built into the feet (rubber, or a sprung foot) you can use a small position offset to generate such a torque.
You mentioned that to get the an all axis balance you'd need 2 extra gyros totaling in 4. Would it not be possible to have 3 gyros set up in a triangle with independent rotation driven by motors instead of the sync gears? If it works it should save a lot of weight and reduce the footprint. Would also work really well with your tripod robot due to the small footprint on top
Hi there James, cool video, looks terrifying. Just wanted to let you know your hair game is on point in this video. I'm a straight dude so I dunno what you changed, but it really works for you.
have you experimented with old disk drives (HDD) as gyroscopes? The feeling of moving around a spinning HDD in your hand is rather weird. There are pretty fast, 7200 rpm are commun
14:22 --- using a pivot point on the scooter deck to affix the unit may help in the unit righting itself and also a single linkage from the top of the unit to turn the handle bars like a person would if they were trying to balance on the spot- or would that be too hard for you to achieve James?
I’m aware that it’s only being spun at low rpm’s but the printed flywheel with the ball bearings for added mass made me nervous! Although I’d like to see it spun at much higher speeds from a good distance! And behind something solid!
I realize they are not as prevalent as before, but I think drum brakes may provide more mass in a similar volume of space. They may even all you to add more mass to the interior cavity of the brake drum. Also, as others have pointed out, I would make a shield or sheath around the rotating mass to protect yourself (and others) from injury. My nerves were on edge every time it started to fall and you reached out to catch it.
The mass moment gets a squared contribution from the distance to the axis of rotation. Putting all your weight on the perimeter is most weight efficient.
What about making giros rotating full 360 degrees? Giro blocks are quite compact and you can do this. And in this case you would not need to worry about limiting their angles.
Tip. Look into the linear motors from Washing machines. If possible use tubing attached to the body of the motors casing and spin that instead of car disks.
You've gotten terrifyingly close to your next project being a prosthetic hand! Please print some sheaths for the flywheel, training out the instinct to catch a falling project takes longer than adding safeties.
PID, D is to slew rate limit. its -ve , or should be . The PID is a beautiful thing. you can pimp it up with limits for parameters, anti-wind up, its always the integral thats the biggest trouble. Have fun.
Make a one wheel motorcycle (those with the driver inside the hollowed out wheel) which keeps its drivers on the lower end of the circle by a reaction wheel running inside the real wheel. This has the benefit of doing regenerative braking, too :)
You'd probably need some quick servos, but it would be cool to have a robot balance like us lowly humans.. Have arms in various directions, and use them to shift the center of gravity. I don't know about you guys, but I can probably balance on one leg for 30 seconds. 😅
Ever think you could make gyroscopic lift with a perpendicular forces to make a vortex that is couter to earths gravity. Like a spinning wheel that spins counnter to the way water spins in your toilet. Then have four wheels one fourth the mass of the big wheel spinning perpendicular to the big wheel?
How difficult would it be to make something closer to the in-game stabilizer? It seems like trying to stabilize multiple axes at once would be difficult and they could throw each other off.
Ah, wheel rotors. one of my favorite attachment stabilizers. now if @Wintergatan just got a few rotors off a truck they'd save a lot of time reinventing the wheel.
i’m working on an autonomous unicycle as a research project and am trying to do a cascade pid for one of the controllers! any tips? i plan on doing position & acceleration, then an observer for velocity won’t be needed bc i can just call it a day in that it’s all controllable & observable.
Isn't marine stabilization system just two big disks spinning opposite of each other or something like it, could that perhaps help? I wrote this a bit soon i think, but it started me thinking. Is there a difference if the flywheels are standing or laying horizontal?
I know your gyro based machines are rather large. Is it feasible and reasonable to scale these designs down for smaller machines. Is a much larger area of the gyros required for proper operation and stability?
Hello James. I think you make a mistake by having your PID-controller output a velocity and not a current/voltage/torque. By controlling the velocity, the resulting torque is not going to be what you expect.
Installing the belt drive on the other side of the discs would allow thecentre line of the disc to be on the centre line of the frame, i would just be Better.









This is legit the scariest thing I've seen you build, only for the forces involved and how close your fingers were to the mass wheel. Super informative!
i was terrified of one of the brackets snapping it falling onto something and exploding, its just so much inertia and mass
I swear every time a youtuber uploads a flywheel episode its the most stressful thing
@@IronDoctorChrisWintergatan this week had me 😬
thankfully these were solid brake discs, dangerous but not likely to fragment on falling and being unventilated they really have no protrusions to speak of
Imagine if he made a gyro with a saw blade…
Stay safe, James. Those flywheels have a lot of energy in them and if that rocked off the table and hit the floor your plastic joints are going to give way and those flywheels are dumping all their energy into getting the heck out of there. Don't be in the way when they do.
I must second this. James, invest in or manufacture yourself a substantial safety shield before you do further experimentation with this. Those flywheels will not stop if they hit you.
@@BazilRat thats not saw blades 😅
I think he's probably aware
@@ThadMiller1 They're very heavy and moving very fast. They will not stop.
@@BazilRatNot stop what? Turning?
I worked in an old-fashioned blacksmith shop for a while. The rule there was: if something falls don't try to catch it, but dodge it!
Every machine should have an e-stop too. It seems he is just driving the motors directly from the receiver output so to stop the motors he needs to turn the knob down. It should be done like drones with an arming switch so the propellers won’t switch on without the switch turned on and will switch off as soon as the switch is turned off, preferably with braking.
Kitchens are similar. A falling knife doesn't have a handle. Just get your feet out of the way.
If you can dodge a red hot ingot, you can dodge an out of control flywheel.
@Alexander-it9lv I appreciate the concern but I will continue to worship Allah by following the teachings of Isa.
You should print sheaths, or at least covers to the rotating disks. As is, you're one balance mishap away from losing fingers, especially since every time it falls, you reach for it with bare hands...
losing*
or at least invest in a good pair of leather work gloves.
@@Shit_I_Missed. Gloves are a bad idea when working with rotating machines. The idea is that an abrasion is preferable compared to having the gloves being pulled in.
Lol don’t print them, get 1/4” thick clear polycarbonate sheet NOT ACRYLIC and thick metal corners then bolt it together. Only reason you probably don’t need thicker is those discs are smooth and solid metal incapable of fracturing under the rotational load applied.
@@Shit_I_Missed.That's a horrendous idea with rotating machines, wouldn't want your arm getting sucked in.
A tether from the top of the unit to a strong fixed point above during testing will prevent dangerous devices like this tipping over. A mercury (for simplicity) tilt switch to cut power on toppling and automatic brake pads are also an idea. Explosive activated pads used on Sawstop table saws offers the best protection, but are expensive. Cheaper than sewing fingers back on though. ;)
It already has an IMU, the tilt detection could be done a lot better than using a mercury tilt switch. Perhaps the biggest error is that the flywheels seem to be directly controlled by that knob on the controller. It should at least be done like drones do it with a separate arming switch. In an emergency flicking a switch is much faster than turning a knob and it is also more definite, it is either on or off, there is no potential for it to be almost off.
Lol you should need to hold a hand held switch down to even make it run. @@conorstewart2214
I feel like this is the most dangerous and least energy efficient way to keep a wheeled vehicle balanced. Very cool i want more!
You should fear flywheels much more than you seem to based on this video. Cover them up, and do not reach for/near them while they're spinning.
nice to see you make a video on the topic, your videos came to mind a few times for me during all the builds I saw on Zelda: TOTK
Excellent work in designing, manufacture, explanation, videoing, entertainment and finally using the unit of centrifugal force. 5 stars
The video game one reminds me more of the reaction wheel demos with the cube that can 'jump' up to it's side then to a corner.
I guess the ideal one would be three big reaction wheels for crude correction and three smaller gyros for fine control?
But for now, I'm going to enjoy watching the somewhat scary device you have made. :)
The other three mechanics watching you use the jack holes instead of the mounting holes 🤯🤯🤯
eh the mounting holes aren't what take the load anyway they're there to hold the disc in place when there's no wheel, the way it's supposed to be constrained is by face contact alone, the wheel studs just happen to pass through it but shouldn't really be doing any force transmission
@11:05 Bro put his hand on the thing and instantly realize and cut the speed! I say this shouldve been setup on the ground instead of a rickety table.. please be careful James
You can use reaction wheels as both a motive force and as a gyro (like you showed previously by balancing). Those little "dancing cube" robots do it where they use the wheels to fling themselves up then stand on end. Those usually have three wheels though, one for each axis. Maybe you could use some simple AI where it tweaks the PID values automatically to stabilize with various loads.
Car disk brakes are a great source, but, even better van rear disk brakes. They're slightly heavier, but, because the mass is centered around the band (because of the parking brake), the weight is even better distributed for a gyroscope. Ultimately tho, i think the best gyro you could make, that's sized and weight properly is a 20" bicycle wheel that has a banding of lead wrapped around. This is what we used back in school and it was super easy to make. At that time, we took lead sheets (the stuff used for meeting the roof of a house with the brick work) and wrapped them into a long "snake", which then got mashed into the 20" rim, which in then locked it into place because of the lips that usually hold the tire in place. We also secured it with a banding of steel, which cleverly put the locking tab on the size with the least weight, which in turn got our wheel nearly perfectly balanced without much work. To turn it, we used to use a fan motor with a locking clutch from a lawn mower.
Scary coincidence that I’d just watched War of the Worlds and then you mention using this in a tripod robot!
I near had a heart attack when you dived for the moving unstable stabilizer.
Would drum brakes work better for the gyro elements as they have a greater concentrated mass at the outer edge?
2:22 - such a great idea 💡 - love when one can repurpose something cheap and mass produced for some project 💪🤓
Love the direction this build it going! Bigger
James is so proffesional it feels like an educational video (in a good way)
Your tightrope walking cheat device inspired me to build a toroid ring motor as a free-floating reaction wheel. Its not free floating, yet. But I think its got possibilities. As a satellite staibalizer maybe. no contact between the rotor and stator. And here the brake disks have alot of mass at low velocity near the centre, a toroid on spokes would make a much lighter machine with all the mass at one velocity. Love the channel, hope you have a holiday from this.
I wonder if two gyro wheels could be arranged lying down one above the other, like in the video but on its side, and each rotated on 2 axis synced together to balance for both pitch and roll at the same time.
The threaded holes you bolted up to are for threading a bolt into to pop the rotor off of the wheel hub when removing it. That being their only function, they aren't as precisely placed as the lug holes or hub ring. So having used that as your mount point might be the source of your off center vibrations. Also a break shop should be able to balance your rotors for fairly cheap if you want to get better precision.
Also using conical roller bearings rather than ball bearings would eliminate and play at the axle that may be contributing to vibration.
You have quite a habit of making your contemporaries look like absolute posers. Thanks for the thousandth time for sharing your ideas. I really can't say how many times I've gotten invaluable design inspiration from your builds. Usually simple problems that I've overthought and overengineered you've solved with one part.
Have to say, when the gyro frame fell over and the flange on the esc landed right on the battery I got flashbacks. It's always the pointy bits.
If thrust bearings are needed on the bottom, they should be on the top, too! Great Video, watch those fingers🎉
Brake rotors are a good proof of concept, but their weight is distributed more towards the hub than the edge.
Concentrating weight on the outer radius will increase the moment of inertia on those flywheels allowing you to use smaller diameter flywheel or a lighter flywheel for the same angular momentum.
Cool - you've made something legitimately terrifying there - well done(I think?) for reaching out to catch it with no fear of the energy in those spinning brake discs.
Beware the interaction of steel brake disc and ceramic/stone kitchen floor tiles though!
11:04 I should just casually mention that reaching into openly spinning parts with lots of inertia like this can damage or rip your hand off. Even if this was a very human instinct/panic reaction you should not show it on youtube without a word of warning.
I love your brains brother....in strictly the most "bro-mantic" sense, of course.
taking 2 things I absolutely LOVE ( TOTK & flywheels) and using them to make another thing I love (self balancing robots)....It's like you REALLY know your audience.
never stop.
ever.
You make this all look so easy. Thank you, your videos are an inspiration.
5:07 i admit i haven't used that battery in a while now, so i don't quite remember if it was bulged, but... if they are, be careful. That's no bueno.
You could try making a walking cube, with 3 gyros inside, 1 for each axis, it can pick itself up from any direction
or to save material, time and energy while gaining proper structural integrity make it an eighteyes, what the greek thought of as an 'octahedron'
TAS
I think you could make it self-righting pretty easily by just putting it on top of a hemispherical bottom (like on Weeble-Wobble toys) with a cylindrical extension at the top (so it could lie flat in the extremes)
I so want to see that giant walking tripod robot!!! War of the Worlds here we come 😍🛸
gotta love that unicycle in zelda
Fun fact: If you double the speed of a gyroscope you get 4x of the effects vs double weight which only 2x.
You could build a large sausage-shaped enclosure (punch-bag?) that is attached to the gyroscope inside by springs to resist and absorb impacts (like a washing machine)
Scared the hell out of me when it fell over the first time. I really thought you were gonna grab the rotating gyro. Nice save.
I've seen some footage from an old train that ran on a single track and balanced using gyros, in a time before microcontrollers. They used hydraulics coupled to the gyros to help compensate. It might be possible to do something similar with those pneumatic pistons that hold trunks or hoods open on cars.
i feel like this is something colin should get on board with!
I love seeing the progression you make from small to potential giant three legged robot. Seems the past colabs with Colin Furze are influencing you a lot. 😊😅
Clever idea to use automotive brake disks as flywheels!
@Alexander-it9lv Buddha says to soak your fat head
Its gonna be HUGE. Can't wait!
This should be a product.
An affordable Control moment gyro in available in different sizes for hobby and engineering use.
Given your base tripod, I would use ONE gyro, rotating in the horizontal plane with pitch/roll servos. Tipping it as appropriate, you should be able to use that single gyro to stabilize _both_ pitch and roll, without any unneeded yaw issues.
You will also need to pay attention to the gyro position with an integral term, using the robot off-center moment to keep the gyro flat over the long term. But I believe that this would be considerably simpler than the monstrosity of multiple gyros and translation you appear to be planning.
There is a basic problem at hand, namely that such a robot would be better controlled by leg force than position. That would support a controllable torque to precess the gyro to level when needed. But if you have _some_ spring constant built into the feet (rubber, or a sprung foot) you can use a small position offset to generate such a torque.
You mentioned that to get the an all axis balance you'd need 2 extra gyros totaling in 4. Would it not be possible to have 3 gyros set up in a triangle with independent rotation driven by motors instead of the sync gears? If it works it should save a lot of weight and reduce the footprint. Would also work really well with your tripod robot due to the small footprint on top
I was also wondering what would happen if you used heavier disks in order to reduce the size, maybe using tungsten due to its density
It may be, but I'm not sure they'd be as effective in any axis?
Hi there James, cool video, looks terrifying. Just wanted to let you know your hair game is on point in this video. I'm a straight dude so I dunno what you changed, but it really works for you.
have you experimented with old disk drives (HDD) as gyroscopes? The feeling of moving around a spinning HDD in your hand is rather weird. There are pretty fast, 7200 rpm are commun
14:22 --- using a pivot point on the scooter deck to affix the unit may help in the unit righting itself and also a single linkage from the top of the unit to turn the handle bars like a person would if they were trying to balance on the spot- or would that be too hard for you to achieve James?
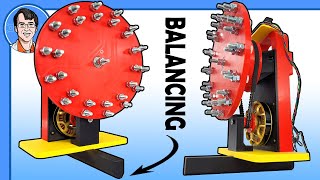
"This mechanism is great for balancing."
"Two legged walking robot."
"As you can see, I need something bigger than this..."
James is making a Yeager?!
I’m aware that it’s only being spun at low rpm’s but the printed flywheel with the ball bearings for added mass made me nervous! Although I’d like to see it spun at much higher speeds from a good distance! And behind something solid!
I don't know why, but there is a real comedic timing to you pulling out an identical copy of the thing you just made from out of frame.
I realize they are not as prevalent as before, but I think drum brakes may provide more mass in a similar volume of space. They may even all you to add more mass to the interior cavity of the brake drum. Also, as others have pointed out, I would make a shield or sheath around the rotating mass to protect yourself (and others) from injury. My nerves were on edge every time it started to fall and you reached out to catch it.
The mass moment gets a squared contribution from the distance to the axis of rotation. Putting all your weight on the perimeter is most weight efficient.
What about making giros rotating full 360 degrees? Giro blocks are quite compact and you can do this. And in this case you would not need to worry about limiting their angles.
I'm not sure what would happen when they pass 45' - would they start applying force in the wrong axis?
I am as layman as it gets but wouldn't both applying force in the wrong axis cancel eachother out?
Tip.
Look into the linear motors from Washing machines.
If possible use tubing attached to the body of the motors casing and spin that instead of car disks.
hell yeah more stabilizer content!
You've gotten terrifyingly close to your next project being a prosthetic hand! Please print some sheaths for the flywheel, training out the instinct to catch a falling project takes longer than adding safeties.
Some sort of cub and ball setup for the underneath, leans to move
my heart just jumped out of my chest when I saw it almost fall
PID, D is to slew rate limit. its -ve , or should be . The PID is a beautiful thing. you can pimp it up with limits for parameters, anti-wind up, its always the integral thats the biggest trouble. Have fun.
Should take it outside and show the community, maybe take it to a skate park. Seeing something like this as a kid would have been awesome.
If you’re not going to add some serious safety features I’d suggest that you sharpen the brake discs so that they take your leg off cleanly
That gyroscopic mechanism makes a sound very similar to those old-timey radio science fiction rocket ships gyroscopic sound effect.
Could two-axis control be achieved with two gyros, if they were gimballed in two axes?
Please, James, Please turn a giant gyro like a corkscrew. Try to make it do the motion it actually makes when you push it sideways.
Make a one wheel motorcycle (those with the driver inside the hollowed out wheel) which keeps its drivers on the lower end of the circle by a reaction wheel running inside the real wheel. This has the benefit of doing regenerative braking, too :)
You'd probably need some quick servos, but it would be cool to have a robot balance like us lowly humans.. Have arms in various directions, and use them to shift the center of gravity. I don't know about you guys, but I can probably balance on one leg for 30 seconds. 😅
The car disk brakes have a lot of mass in the center which is inefficient for angular momentum.
this is a stupid project in the best possible way ^^. Love it
Would it be possible to make it move forward with only those two gyros as well as balance?
This thing is terrifying at full speed. So the only option is to go BIGGER and FASTER!
Ever think you could make gyroscopic lift with a perpendicular forces to make a vortex that is couter to earths gravity. Like a spinning wheel that spins counnter to the way water spins in your toilet. Then have four wheels one fourth the mass of the big wheel spinning perpendicular to the big wheel?
Seems like just using the gyro to help the tripod hold it's balance by adjusting the leg positions like most robots would be easier and more useful.
Every time he says "position" my mind goes "WHERE IT IS TO A POSITION WHERE IT ISN'T"
How difficult would it be to make something closer to the in-game stabilizer? It seems like trying to stabilize multiple axes at once would be difficult and they could throw each other off.
That's pretty interesting!! Cool stuff
Could you do 3 gyros at 120degrees instead of 2 pairs of 2?
?Yeah I think so, but they might not be as effective?
Good, fun, smart, and entertaining content made for everyone to enjoy. Good stuff.
I thought the Opera browser went the way of the dinosaur. Glad to see it is still around.
Where is the repository on your GitHub about this double gyroscope????
Ah, wheel rotors. one of my favorite attachment stabilizers. now if @Wintergatan just got a few rotors off a truck they'd save a lot of time reinventing the wheel.
Where do you buy your aluminum extrusion?
How long until you create a ClapTrap from Borderlands?
i’m working on an autonomous unicycle as a research project and am trying to do a cascade pid for one of the controllers! any tips? i plan on doing position & acceleration, then an observer for velocity won’t be needed bc i can just call it a day in that it’s all controllable & observable.
Would it be possible to create a system with three gyroscopes that were like standard Omni directional wheels?
Could you use three gyros instead of two pairs?
Next thing is making the scooter able to curve and go by itself using a remote control.
Isn't the Mega fast enough to process the IMU data on its own? Why is there a requirement for a sister controller?
dc motor by axial magnetic field on a bearing, for example +/- rings and the bearings move, with a 3rd moving slot disc on top
how amount moment of inertia balancing, ie, the normal way you walk
those look like legs, of a bot
self-standing bike, with rotational mass flywheel energy battery combo
Can you get 2 dimensions with 3 gyros?
or do you absolutely have to have pairs?
Isn't marine stabilization system just two big disks spinning opposite of each other or something like it, could that perhaps help? I wrote this a bit soon i think, but it started me thinking. Is there a difference if the flywheels are standing or laying horizontal?
random thought...people seem to use our arms as gyros as we walk or run ...ever think of lever based ones on walkers vs round ones
Early into the vid and I'm hoping we'll eventually get to see a quad gyro walking robot! Make it happen!!
I know your gyro based machines are rather large. Is it feasible and reasonable to scale these designs down for smaller machines. Is a much larger area of the gyros required for proper operation and stability?
Hello James. I think you make a mistake by having your PID-controller output a velocity and not a current/voltage/torque. By controlling the velocity, the resulting torque is not going to be what you expect.
Installing the belt drive on the other side of the discs would allow thecentre line of the disc to be on the centre line of the frame, i would just be Better.
Id love to see you add a second pair of gyros.
Lol stabilizers in Totk don’t precess nor do they break free of their mounts and skitter around until someone has a really bad day.
Please make a quad-legged or chicken-legged mech from Armored Core with this balancing unit! 🤖
Awesome, just be careful about your fingers!! (11:03)
Ya that made me inhale sharply with concern. Yikes
A falling knife has no handle
Quick question: what happend to the really useful robot project?
I thought you had it?
Sadly not
could also put it on a unicycle then effortlessly become good at unicycling.