You are single handedly saving my butt in this mechanics course I'm in. I have had a hard time understanding the text book we're using, but you usually have a video on whatever the topic of the week is, and watching your explanations first and then going to class/reading the textbook has been a much better way for me to figure out what is going on than just ineffectually staring at my textbook and feeling stupid.
Omg. You are just wonderful. I really had hard time understanding this concept. but you broke down it into simpler steps that are easy to follow. Thanks a lot for helping out. God bless you.
There's a random UA-cam video of a Japanese guy demonstrating a double pendulum. Watched it, and kept on clicking the related videos until I get here. Funny the equations made sense somehow. I was lost on partial derivation. Anyways, great video.
Hi, I was going through some of the algebra while trying to do this problem myself with the help of your video and I think you may have made an error in 19:33 where you find the partial of the lagrange with respect to partial theta 2. I think you missed a negative symbol when finding the derivative of cos(theta1 - theta2). Great video, though, thanks for it. Helped a bunch!
There are two negatives due to applying the chain rule, so they cancel out. The first negative comes from differentiating cos( ) and we get a second negative when differentiating the (θ1 - θ2) part with respect to θ2.
Nice video.. Very good explanation... you save me . I tried this problem using Polar coordinates and it looked more organized. using cartesian coordinates got me headaches.
Yes, you can divide through by m2 to simplify. Usually, when deriving these equations of motion, I like to leave it in this form because I find the equation more meaningful when each term has units of force (or force/length).
This is due to the fact that this system is highly nonlinear. As a result, the response of the system is extremely sensitive to the initial conditions. A slight change to the initial condition will result in a very different response. This is one of the hallmarks of a chaotic system.
I have got a really stupid question if you don't mind; in writing potential energy equation for mass 1 and 2, you wrote as (I'm considering m1 for now): m1gy1 = m1g(-L1cosO1). My question is that why didn't you take 'h' = (L1-L1cosO1) instead you took only -L1cosO1. Shouldn't the 'h' be the difference of the mass from initial (mean) position to the extreme position? Thanks for all these great videos btw; they are helping a lot.
Definitely not a stupid question...both are correct. The difference is just due to a constant (L1) which is a result of where one assumes the potential energy is zero. In this problem, I have assumed that zero potential is where the system attaches to the ceiling. In your description of the problem, zero potential (of m1) is assumed to be at the rest position of m1. The point is that we don't really care about the absolute value of the potential energy, but rather WE CARE ABOUT ITS DERIVATIVE (ie the CHANGE in potential energy with each coordinate). Once we substitute the potential energy expression into Lagrange's equations and differentiate it, the constant disappears and both our descriptions of potential energy yield the same results.
I have question about the potential energy isn't it ==> V = mg(Y1-L1)+mg(Y2-(L1+L2)) ? I thought that the potential energy would be only the remaining part and not all of the height (Y is positive in the up direction) thank you so much for the content , really really helpful !
The difference here is just a matter of the coordinate system used and where you place the origin. This comes down to the question of where does the system have zero potential energy. Some might define that the point of zero potential energy is the center of the earth, others might define it as the height of a mass in its equilibrium position. In my case, I placed the origin at the hinge (whereas yours places it at the mass). Shifting the location of the origin, will simply change the potential energy expression by a constant. So the observation that you made is the correct one, namely, that for the purpose of Lagrange's Equations, the actual value of the potential energy is irrelevant. What is relevant is the DERIVATIVE of the potential energy - as long as these match, then you're good. As a result, you should pick whichever coordinate system you find most comfortable.
Right around the 18:12 mark it appears you forgot the (theta dot 1 - theta dot 2) term from the time derivative component, you missed it on both equations of motion actually. Is there some unmentioned reason that term goes away?
I skipped a step here just to save a little time. If you expand out the equation (ie distribute the (theta dot 1 - theta dot 2) ), you will find that terms cancel out. Try expanding out the previous step and a piece of paper and you will see which terms cancel out. It is correct as written.
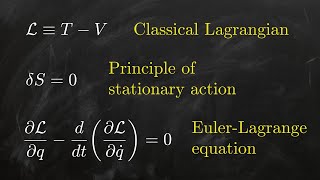
Hi, great video! I have a rather stupid question but I'm only in high school so we haven't looked at Langrangians yet. What is the purpose of you using Lagrange's equation once you have your L (where L is T-V)? Thanks a lot
Often in structural vibration theory, one must deal with structures which are NOT statically determinate. This means that one cannot use Newton's 2nd Law to get meaningful results and needs to turn to other methods - namely energy methods which deal with conservation of energy amongst other things. Lagrange's equations are used to find the equations of motion from the expressions for the energy of the system and these equations of motion can then be solved to determine exactly how the system moves in time. Lagrange's equations are derived using something called Hamilton's Principle which relies on a branch of mathematics called Variational Calculus. It's advanced stuff and typically deriving Lagrange's Equations is saved for advanced structures classes. HOWEVER, the resulting Lagrange's Equations are easy to implement and are very powerful tools so their use typically gets introduced in lower level classes - long before most folks have the required background to derive them.
@@Freeball99 Ok great thanks, just another question I have is what the next step would be because I know that in your video involving the simple pendulum, you had a differential equation that you solved and got θ(t) = Acoswt. How would you go from what you have in this video to something like θ(t) = Acoswt? Thanks again.
@@cankaraca456 Since these equations are nonlinear in their current form, one cannot write them in a closed-form solution (ie you cannot write the response as a function). Therefore, the equations must be integrated directly using numerical methods. I have showed an example of this here: ua-cam.com/video/SFpJbmHIUB0/v-deo.html HOWEVER, the equations can be linearized IF the displacements are assumed to be small (θ's of less than about 15°). In this case, you can make the assumption that Sin θ = θ and that Cos θ = 1 and apply this to the equations of motion. The response can then be written as a function (as you have described) using the method shown in this video: ua-cam.com/video/zo2Ml88QyrA/v-deo.html
at the 9:49 mark... where does the 3rd term for the KE come from? The one simplified by the the double angle identity provided at the beginning. By my understanding factoring out the the l1,thea1 & l2,theta2 terms should yield 2 terms that simplify to 1... (sin^2 + cos^2) =1, where does the 3rd term come from? 2(l1)(l2)theta1theta2(coscos+sinsin)?
This comes from squaring the velocities on the previous line (though I am noticing that I am missing a squared sign on the last term). If you write out the previous line and expand it, I think it will become clear.
It id nice , for me if possible, give me the information on this question. "Consider a partical of mass m moving freely in a scalar potential v. Find the equation of motion of that partical in A) Cartesian motion B)cylindrical C) and spherical notion Thank you to to see my comment.
18:15 sir ig you wrote an extra term there + there won't be any negative term, bcz we have minus sign in the formula L=T-V and thus the negative terms will become positive
Why when doing generalized coordinates happens that, when derivating by one of these coordinates, let say theta_1 as it is done in the video, when is applied to the time derivative of the same coordinate, it happen to be considered as an uncorrelated constant: d/dtheta_1 (d/dt(theta_1(t))) = 0 ???? Or as is done on the video: d/dtheta_1( dot_theta_1) = 0 ??? Why happens that d/dt(theta_1) is not dependent of theta_1??? I can't understand this :s
This goes back to the derivation of the Euler-Lagrange Equation and Lagrange's Equation which I show in this video: ua-cam.com/video/LY-JcuYqSEk/v-deo.html At one point in the derivation, we take the variation of the Lagrangian (at the 2:30 mark in the attached video) and this involves that the TOTAL DERIVATIVE of the Lagrangian. When doing this, we treat the dependent variables (the coordinates) and their derivatives as independent quantities. We later resolve the fact that there are related quantities by using integration by parts. It's a little hard to explain in this text, but if you watch the video, it covers this part.
Yes, you can derive these equations by drawing the free body diagrams for each mass and then applying Newton's 2nd Law. This can be a little tricky as it's easy to make mistakes if you're not careful (which is why using Lagrange's Equations is preferable). Unfortunately, I don't have a video on this, but I'm sure you'll be able to find one online.
these 'solutions' are the differential equations describing the motion of the double pendulum. Indeed, this is not a conclusive solution just yet. In order to obtain this, you should solve this differential equation given certain boundary conditions.
This would, in effect, increase g. So it would increase the restoring force on the pendulum. As a result, the pendulum will oscillate at a higher frequency.
Thanks for the good explanation, I want to ask why the double pendulum has the equation of centripetal acceleration(has theta1^2)? not like the single pendulum case?
In equation 19 the + sign is correct. It's actually the line before this where I should have put a + sign instead of a -ve. Substituting eqn. 18 into eqn. 15 is what causes the sign to flip to +ve. Thanks for catching it.
Hi, thanks for this detailed video. I have a question for you. Are these equations of motion and mathematical model of the double pendulum same thing? Or mathematical model of the double pendulum is what and how to calculated?
If we're going to get technical with this, I'd say the following...the EOM's and the mathematical model are not the same thing, but rather the EOM's are derived from the mathematical model. From the EOM's, we can calculate the response of the system.
This is due to assumption #1 that the masses are point masses so the have no rotational kinetic energy. The rotational KE effects are generally omitted for teaching purposes just in order to keep it a little more simple and easy to follow. Also, for a typical setup, the rotational KE effects tend to be less important (unless the diameter of the masses is very large). The compound pendulum then demonstrates how to include these effects. For a compound pendulum, the rotational KE effects tend to be far more important than for the case of the simple pendulum.
This comes down to where you set your zero-point. In reality, the potential energy is only zero at the center of the earth, however, we can arbitrarily set a point to be zero by shifting our axes. The truth is that we really only care about change in the potential energy rather than the absolute value. In this problem, I the axes we placed at the top hinge, so any masses below this would, in effect, have -ve potential energy. If the axes had, instead, been attached to the bottom mass, then that would be zero potential energy and all potential energies would be positive.
Your equations seems to be in miss agreement with Leonard Merovitch's (from his book Methods of Analytical Dynamics, example 2.6 page 78). The potential energy equation from his book is: V = m1 g L1 (1-cosθ1) + m2 g [L1 (1-cosθ1) + L2 (1-cosθ2) ] The problem seems to be the heights considered, let's find them out for Meirovitch's who they are: V = m1 g h1 + m2 g h2 = m1 g (L1 - L1 cosθ1) + m2 g (L1 - L1 cosθ1 + L2 - L2 cosθ2), h1 = L1-L1cosθ1, and h2 = L1 - L1 cosθ1 + L2 - L2 cosθ2 Let's do the same for your video: V = m1 g h1 + m2 g h2 = m1 g (-L1 cosθ1) + m2 g (-L1 cosθ1 - L2 cosθ2) h1 = -L1 cosθ1 h2 = -L1 cosθ1 - L2 cosθ2 I see a lot of people on the internet solving the double pendulum the same way as you, I'm trying to figure out why, maybe you can explain me? In my understanding your equation actually describes the motion for the double pendulum when it moves inside the first quadrant of cartesian coordinates when the masses are moving anti-clockwise and the initial condition is that they are aligned vertically in the positive Y, am I right? It also seems to me that once you must differentiate the potential energy in θ1 and θ2 this difference should not matter in the end result (mathematically) whatsowever, but, in terms of physical interpretation, maybe. I would be so grateful if you could find the time to answer these questions, I'm really struggling to find this out.
The difference here is just a matter of the coordinate system used and where you place the origin. This comes down to the question of where does the system have zero potential energy. Some might define that the point of zero potential energy is the center of the earth, others might define it as the height of a mass in its equilibrium position. In my case, I placed the origin at the hinge (whereas Meirovich places it at the mass). Shifting the location of the origin, will simply change the potential energy expression by a constant. So the observation that you made is the correct one, namely, that for the purpose of Lagrange's Equations, the actual value of the potential energy is irrelevant. What is relevant is the DERIVATIVE of the potential energy. As a result, you should pick whichever coordinate system you find most comfortable.
I showed this mathematically in going from equation 8 to equation 9. If you write out on the substitutions on a piece of paper, you'll find it's just algebra. But one way that you can think about it physically, it was when Θ1 increases, it lifts, both m1 and m2, however, when Θ2 increases it lifts only m2.
It may seem a silly question but if one assumes theta(1) = theta (2) at all times the system then becomes a single pendulum i.e. a rigid rod but with an extra mass in the 'middle'. Would the equations of motion you have produced describe the motion of such a pendulum?
It has been 15 years and change since I took a calc class: why does the derivative of x sub 1 include the derivative of theta sub 1? Isn't the derivative of Sin (x) just Cos (x)?
Because theta is considered a function of time. That means we have to apply the "chain rule": multiply the expression we get (in this case exactly that cos(theta sub 1) which you mentioned) by the derivative of the function inside the sine (theta sub 1)
@@Freeball99 Awesome! It looks so good! I'm a Physics teacher and I'll have to be teaching online classes and I love the way this looks so that's what I'm going to use
The Q_i represent the generalized force. It is zero if there is no externally applied force/moment in the direction of a particular generalized coordinate.
@19:04 I still find in eq.19 an error in the last term, it is a minus sign (-) that precedes the last term, isn't it? Anyway a great explanation of the exercise Thanks for sharing
You would incorporate this on the right-hand side of the equations as a moment. If it's a tangential force, then this would only affect the 2nd equation. If it is truly a horizontal force, then it would affect both equations of motion.
When taking the derivative with respect to θ2, we get two negatives in the first term which combine to form a positive. Applying the chain rule to cos(θ1 - θ2) gives us -sin(θ1 - θ2) · (-1) = +sin(θ1 - θ2) . So, this term should have a positive sign.
Generally I find it simpler to derive pendulum problems in cartesian coordinates and it is less prone to errors. You can certainly derive it in polar coordinates. Try it and see if you can get the same results.
This comes from the geometry of the problem and based on the fact that θ1 is measured relative to the vertical direction. Based on the definition of the coordinate system and the location of the angle, θ1, the x1-coordinate is equal to the length of the side opposite θ1, and we already know the length of the hypotenuse (which is L1), so from trigonometry: sin(θ1) = x1 / L1 which gives us x1 = L1 * sin(θ1)
Hi, do you know the motion equation for 3d double pendulum? that works in 3 planes, x y z, and also has the rotational angle. been searching the internet and books for it, can't find any. big thanks if you see and respond to this comment
Hi, its an amazing video. Congratulations! I would like to do how to proceed in the case that the double pendulum is attached to a car of mass m1+m2 with velocity v0 in a surface without friction.
I have a video with a pendulum on a cart (ua-cam.com/video/Fo7kuUAHj3s/v-deo.html). While it is not exactly what you're asking about, it is pretty close. Using this video and the one above, you should be able to derive the equations of motion for a double pendulum attached to a cart.
If there is a moment applied about the first hinge point, then this will appear on the right hand side of the first equations and if there is a moment applied about the second hinge point then this will appear on the right hand side of the second equation.
Really great video! I have a question about potential energy, eqn 9. The h1 for m1 shouldn't be l1(1-cos(theta 1))? And the h2 for m2 corresponds l1(1-cos(theta 1))+l2(1-cos(theta 2))? Why use the y1 which is displacement of m1? It seems not consistent with your another video that describes the potential energy with h. Looking forward to your help. Thanks~
Good question. I purposely did it differently to prove a point...These are, in effect, the same thing. They just differs by a constant, so really it amounts to where one decided to place the the point of zero potential energy (the origin of your axes). I have assumed that the zero potential is at the hinge while your expression puts the zero potential energy location at the lowest position of the mass. The truth is that BOTH are equally valid. It turns out that we don't really care about the absolute value of the potential energy (and the location that we call zero potential energy is somewhat arbitrary - technically the point of zero potential energy is really at the center of the earth). Rather, what we care about is the DERIVATIVE of the potential energy and the derivatives are identical (because you just added a constant, l1, which disappears when you differentiate it.
@@Freeball99 I have been watching different videos searching for an explanation on why people use different methods for calculating potential energy. Thanks so much for the thorough explanation!:-)
Two equal masses connected to a massless rigid rod of length L forming a dumbbell rotated In X-Y plane. Find Lagrange equation of motion for this system.
In the kinetic energy for m1, L1 multiplied by theta dot 1, should L1 be squared? Another thing, and if I want to find the small oscillations of this double pendulum, where should I start?
In the case of a simple pendulum, it is a common assumption. What we are really saying is that the mass of the rod is so much less than the mass of the pendulum bob that its contribution to the kinetic and potential energies is insignificant. If we want to take the mass of the rod into account (as it grows larger), then this becomes a compound pendulum. I have some videos on compound pendulums with explain how to model those.
Equation 19 is correct as written. I multiplied out the (theta_dot1 - theta_dot2) and then the terms with the theta_dot2 cancel out. What remains is just the theta_dot1 which appears in eqn 19. If you write it out, it will become apparent.
Is this solution used to make a description of the energy? since if I put that teta1 and teta2 are equal to pi / 2 and their derivatives equal to zero, it gives me that the energy of the system is zero. this does not agree with his movement
There you go. ua-cam.com/video/nBBQKZb6JZk/v-deo.html Additionally, this model can be incorporated into a control's problem and then the combined system can be solved...but that's for another class.
Hi... I got a question. In the kinetic energy there is no inertia applied? With an angular velocity? Thanks for the video And what if I want to do an inverted double pendulum, should I change the signs of y? :)
This is due to the assumption that these are point masses so they have no rotatory inertia. For the inverted pendulum problem, take a look at this video which explains it: ua-cam.com/video/Fo7kuUAHj3s/v-deo.html - You need to be careful with just flipping your coordinate system. Fundamentally, it is the potential energy expression that will flip signs, but you need to be careful to be consistent with your definition of the positive direction of θ.
@@Freeball99 Thanks for the explanaiton. The thing is that I need to do like a human spine and I was looking for a mathematical model or at least an example, because it feels so difficult to do a 3D model, don't know if you have any idea... And sorry for bothering you.
Hey, how would one rearrange these so they can be used for a numerical solution? It’s my first time with lagrangians. Edit: By that I mean, is it possible to separate out it to thetaDoubleDot = (something including theta and probably thetaDot) since I’d know how to use that for a numerical solution then.
basically you have a system of 2 second order differential equations and you just solve them which is massively painful because....well, just try it :D
This is because θ2 is a function of t. If we differentiate w.r.t. θ1, then we would treat θ2 as a constant, HOWEVER, when we differentiate w.r.t. t, then we are take the so-called "total derivative" - i.e. it is not a partial derivative.
@@michaelwang1730 The Qi's are the generalize forces (ie forces or moments) associated with the ith coordinate. These are simply the forces/moments that are applied directly to the particular coordinate in question.
would it be much different using radial (a.k.a. polar) coordinate system where the only coordinate known is r (or in this case l1 or l2) and the angle (in this case theta)? Does it only involve skipping the step of converting into cartesian coordinates or is there something more?
You could model this directly in polar coordinates if you prefer. However, from my experience, in most case where you're dealing with pendulums and gravitational effects, it tends to be easier to define your kinematics in cartesian coordinates.
@@Freeball99 weird, I've only been taught the polar method. I found it difficult transforming between the two. I still prefer the polar, due to movement being predominantly circular. Thanks for your reply
Yes it is. Despite the fact that the motion of a double pendulum appears to be chaotic, it is in fact able to be described very accurately up to whatever degree of precision you prefer PROVIDED THAT you know the initial conditions - ie the initial angle of each mass when the system is set into motion.
According to Lagrange's Equations, the generalized forces, Q_i appear on the right hand side of the equation. So in the case of a moment applied to mass 1, this would appear on the right hand side of equation 1. For a moment on mass 2, this would appear on the right hand side of equation 2 - this includes both conservative and non-conservative forces/moments.
@@Freeball99 yeah, and i if i am not wrong on the right hand side we only consider the non conservative forces because the delta W (work done) should be of non conservative forces. plss correct me if i am wrong as at this part i am confused. i get confused on what to put when we come to RHS of Lagrange's Equation
@@nihargandhi3740 Any non-conservative forces should appear on the right-hand side. Additionally, if you have conservative forces, you can EITHER add these on the right-hand side as work OR can be included on the left-hand side as part of the system potential which is just the negative of the external work produced by the conservative force (V = -We).
so, i am not sure weather or not anyone can help me with this, i am working on an assignment in python, and we have been asked to use Euler method to predict the oscillation of a simple pendulum. this i have done, and this is very much thanks to your other video on that subject. the problem now that i have though is, the second part of the assignment is to extend the solution to a new pendulum. the new pendulum though is just the same as the old pendulum but with a joint in the rod. so that it looks very much like a double pendulum. but there is no mass at that new middle point, and that is what is making me feel uneasy. i dont think i know what the best way to proceed would be, does this Lagrange method support a mass of 0 for one of the pendulum balls? or would it be easier/even possible for me to just modify the code i already have for the euler method of a simple pendulum with a new element? any advice would be appreciated
also, another weird thing is, it specifically asks that i derive the equations of motion in terms of theta1 and theta2, these being the angles of rotation of the two joints, instead of in terms of the x,y cords of the two points, which is yet more confusing to me
Hello good person! I came here to learn, and noticed that you are using an amazing drawing program that I would like to know more about; if you don't mind! :D P.S.: Good video by the way!









It's encouraging to note that if, in equation 19, m2 and l2 are equal to zero, the equation reduces to that of the simple pendulum.
no shit sherlock
yeah well ofcourse that is going to happen lmao
@@random22453Only if you dont do anything wrong😂
The soundtrack played at 8:27 almost gave me a heart attack.
You are single handedly saving my butt in this mechanics course I'm in. I have had a hard time understanding the text book we're using, but you usually have a video on whatever the topic of the week is, and watching your explanations first and then going to class/reading the textbook has been a much better way for me to figure out what is going on than just ineffectually staring at my textbook and feeling stupid.
By the way, which textbook were you using for this course?
You have literarly saved me, dude. Thanks.
My computer doesn't even have a font as neat as your hand writing.
Omg. You are just wonderful. I really had hard time understanding this concept. but you broke down it into simpler steps that are easy to follow. Thanks a lot for helping out. God bless you.
Your Playlist is very nice in which college u study?
Double pendulum coding solutions? Thanks for saving me a ton of time in case my teacher asks to 'explain the formulae'. Love from India.
Your channel is my discovery of this year. Thank you for your work.
There's a random UA-cam video of a Japanese guy demonstrating a double pendulum. Watched it, and kept on clicking the related videos until I get here. Funny the equations made sense somehow. I was lost on partial derivation. Anyways, great video.
You are an excellent teacher!
Very good explanation in a very lucid manner.... Thanks a lot for the video....
Thanks a lot. Your teaching style is amazing.
Thanks for clearing my doubts.
Thanks for the video and explanation. Helped a lot.
It literally scared me at 8:29 ngl.
However, great video
Hi, I was going through some of the algebra while trying to do this problem myself with the help of your video and I think you may have made an error in 19:33 where you find the partial of the lagrange with respect to partial theta 2. I think you missed a negative symbol when finding the derivative of cos(theta1 - theta2). Great video, though, thanks for it. Helped a bunch!
There are two negatives due to applying the chain rule, so they cancel out. The first negative comes from differentiating cos( ) and we get a second negative when differentiating the (θ1 - θ2) part with respect to θ2.
Such a great video thank you so much, very comprehensive!
Excellent explanation, thank you!
Nice video.. Very good explanation... you save me . I tried this problem using Polar coordinates and it looked more organized. using cartesian coordinates got me headaches.
Amazing Explanation Sir.
very good explanation
, thank you
Hi, great video, helped me a lot. Just one question, in the last equation found (23), wouldn't it be possible to take m2 off every term?
Yes, you can divide through by m2 to simplify. Usually, when deriving these equations of motion, I like to leave it in this form because I find the equation more meaningful when each term has units of force (or force/length).
Thank you, you really helped a lot!
it's fine until now but how to find the natural frequency for this system of pendulum?
Can you please explain through equations of motion, how double pendulum is an example of chaotic system.
This is due to the fact that this system is highly nonlinear. As a result, the response of the system is extremely sensitive to the initial conditions. A slight change to the initial condition will result in a very different response. This is one of the hallmarks of a chaotic system.
I have got a really stupid question if you don't mind; in writing potential energy equation for mass 1 and 2, you wrote as (I'm considering m1 for now): m1gy1 = m1g(-L1cosO1). My question is that why didn't you take 'h' = (L1-L1cosO1) instead you took only -L1cosO1. Shouldn't the 'h' be the difference of the mass from initial (mean) position to the extreme position? Thanks for all these great videos btw; they are helping a lot.
Definitely not a stupid question...both are correct. The difference is just due to a constant (L1) which is a result of where one assumes the potential energy is zero. In this problem, I have assumed that zero potential is where the system attaches to the ceiling. In your description of the problem, zero potential (of m1) is assumed to be at the rest position of m1.
The point is that we don't really care about the absolute value of the potential energy, but rather WE CARE ABOUT ITS DERIVATIVE (ie the CHANGE in potential energy with each coordinate). Once we substitute the potential energy expression into Lagrange's equations and differentiate it, the constant disappears and both our descriptions of potential energy yield the same results.
thank you ,you explained very clear god bless you
I have question about the potential energy
isn't it ==> V = mg(Y1-L1)+mg(Y2-(L1+L2)) ? I thought that the potential energy would be only the remaining part and not all of the height (Y is positive in the up direction)
thank you so much for the content , really really helpful !
The difference here is just a matter of the coordinate system used and where you place the origin. This comes down to the question of where does the system have zero potential energy. Some might define that the point of zero potential energy is the center of the earth, others might define it as the height of a mass in its equilibrium position. In my case, I placed the origin at the hinge (whereas yours places it at the mass). Shifting the location of the origin, will simply change the potential energy expression by a constant.
So the observation that you made is the correct one, namely, that for the purpose of Lagrange's Equations, the actual value of the potential energy is irrelevant. What is relevant is the DERIVATIVE of the potential energy - as long as these match, then you're good. As a result, you should pick whichever coordinate system you find most comfortable.
Thanks a lot, this lecture make me bright more!!!
Right around the 18:12 mark it appears you forgot the (theta dot 1 - theta dot 2) term from the time derivative component, you missed it on both equations of motion actually. Is there some unmentioned reason that term goes away?
I skipped a step here just to save a little time. If you expand out the equation (ie distribute the (theta dot 1 - theta dot 2) ), you will find that terms cancel out. Try expanding out the previous step and a piece of paper and you will see which terms cancel out. It is correct as written.
I don't believe my luck, I had a double pendulum problem yesterday on a major test and this video pops up today :(
Clearly your best option is to watch all these videos immediately so that you've got the next test covered!!
@@Freeball99 ahhh mate I will but unfortunately we're doing electrodynamics now so these won't show up anytime soon. Love the content tho
thank you, very useful explanation
Hi, great video! I have a rather stupid question but I'm only in high school so we haven't looked at Langrangians yet. What is the purpose of you using Lagrange's equation once you have your L (where L is T-V)? Thanks a lot
Often in structural vibration theory, one must deal with structures which are NOT statically determinate. This means that one cannot use Newton's 2nd Law to get meaningful results and needs to turn to other methods - namely energy methods which deal with conservation of energy amongst other things. Lagrange's equations are used to find the equations of motion from the expressions for the energy of the system and these equations of motion can then be solved to determine exactly how the system moves in time.
Lagrange's equations are derived using something called Hamilton's Principle which relies on a branch of mathematics called Variational Calculus. It's advanced stuff and typically deriving Lagrange's Equations is saved for advanced structures classes. HOWEVER, the resulting Lagrange's Equations are easy to implement and are very powerful tools so their use typically gets introduced in lower level classes - long before most folks have the required background to derive them.
@@Freeball99 Ok great thanks, just another question I have is what the next step would be because I know that in your video involving the simple pendulum, you had a differential equation that you solved and got θ(t) = Acoswt. How would you go from what you have in this video to something like θ(t) = Acoswt? Thanks again.
@@cankaraca456 Since these equations are nonlinear in their current form, one cannot write them in a closed-form solution (ie you cannot write the response as a function). Therefore, the equations must be integrated directly using numerical methods. I have showed an example of this here: ua-cam.com/video/SFpJbmHIUB0/v-deo.html
HOWEVER, the equations can be linearized IF the displacements are assumed to be small (θ's of less than about 15°). In this case, you can make the assumption that Sin θ = θ and that Cos θ = 1 and apply this to the equations of motion. The response can then be written as a function (as you have described) using the method shown in this video: ua-cam.com/video/zo2Ml88QyrA/v-deo.html
at the 9:49 mark... where does the 3rd term for the KE come from? The one simplified by the the double angle identity provided at the beginning. By my understanding factoring out the the l1,thea1 & l2,theta2 terms should yield 2 terms that simplify to 1... (sin^2 + cos^2) =1, where does the 3rd term come from? 2(l1)(l2)theta1theta2(coscos+sinsin)?
This comes from squaring the velocities on the previous line (though I am noticing that I am missing a squared sign on the last term). If you write out the previous line and expand it, I think it will become clear.
It id nice , for me if possible, give me the information on this question.
"Consider a partical of mass m moving freely in a scalar potential v.
Find the equation of motion of that partical in
A) Cartesian motion
B)cylindrical
C) and spherical notion
Thank you to to see my comment.
Thanks for your question, I will have to save this for a different video since the text comments are too limiting.
Awesome video
you are the best
18:15 sir ig you wrote an extra term there + there won't be any negative term, bcz we have minus sign in the formula L=T-V and thus the negative terms will become positive
Yes, there is a careless typo here. The - sign should be + here, I have it correct in the lines that follow.
Which is the extra term?
thanks . Nice and clear instruction. one other thing actually , whats with the sound effect. I jumped the 1st time
Why when doing generalized coordinates happens that, when derivating by one of these coordinates, let say theta_1 as it is done in the video, when is applied to the time derivative of the same coordinate, it happen to be considered as an uncorrelated constant:
d/dtheta_1 (d/dt(theta_1(t))) = 0 ????
Or as is done on the video:
d/dtheta_1( dot_theta_1) = 0 ???
Why happens that d/dt(theta_1) is not dependent of theta_1??? I can't understand this :s
This goes back to the derivation of the Euler-Lagrange Equation and Lagrange's Equation which I show in this video: ua-cam.com/video/LY-JcuYqSEk/v-deo.html At one point in the derivation, we take the variation of the Lagrangian (at the 2:30 mark in the attached video) and this involves that the TOTAL DERIVATIVE of the Lagrangian. When doing this, we treat the dependent variables (the coordinates) and their derivatives as independent quantities. We later resolve the fact that there are related quantities by using integration by parts. It's a little hard to explain in this text, but if you watch the video, it covers this part.
Shouldn't g be negative when computing the potential energy. They Y axis is pointing upwards.
Hello and thank you very much for this solution. Do you know of any way to deduce these equations of motion directly from Newton´s equations?
Yes, you can derive these equations by drawing the free body diagrams for each mass and then applying Newton's 2nd Law. This can be a little tricky as it's easy to make mistakes if you're not careful (which is why using Lagrange's Equations is preferable). Unfortunately, I don't have a video on this, but I'm sure you'll be able to find one online.
great channel !
Why we do . .
X+y
In kwettc energy
Well done!
what does those solutions mean? they still look like equations that needs to be solved
Absolutely!!
these 'solutions' are the differential equations describing the motion of the double pendulum. Indeed, this is not a conclusive solution just yet. In order to obtain this, you should solve this differential equation given certain boundary conditions.
I solve the equations in this video: ua-cam.com/video/nBBQKZb6JZk/v-deo.html
Thank you i can solve my assignment thanks to you
e comm t piac e copia frate
e ij so a scem ca
If we place pendulum in elevator with upward acceleration a . What effect on them?
This would, in effect, increase g. So it would increase the restoring force on the pendulum. As a result, the pendulum will oscillate at a higher frequency.
@@Freeball99 thanks 😊
i am lloking for the solution with considering mass of the links...what would change if i consider the mass of the links?
This video address it: ua-cam.com/video/eBg8gof1RBg/v-deo.html
Thanks for the good explanation, I want to ask why the double pendulum has the equation of centripetal acceleration(has theta1^2)? not like the single pendulum case?
This is due to the fact that the second pendulum, due to its acceleration, exerts a force (moment) on the first pendulum.
In the 1st equation why is it not "- (m1 + m2)gsin(theta1)" i.e. why is it positive and not negative?
In equation 19 the + sign is correct. It's actually the line before this where I should have put a + sign instead of a -ve. Substituting eqn. 18 into eqn. 15 is what causes the sign to flip to +ve. Thanks for catching it.
Hi, thanks for this detailed video. I have a question for you. Are these equations of motion and mathematical model of the double pendulum same thing? Or mathematical model of the double pendulum is what and how to calculated?
If we're going to get technical with this, I'd say the following...the EOM's and the mathematical model are not the same thing, but rather the EOM's are derived from the mathematical model. From the EOM's, we can calculate the response of the system.
dhanyawaad
A silly question, why in this case we don't consider the rotacional Kinect energy such as the double compound case ?
This is due to assumption #1 that the masses are point masses so the have no rotational kinetic energy. The rotational KE effects are generally omitted for teaching purposes just in order to keep it a little more simple and easy to follow. Also, for a typical setup, the rotational KE effects tend to be less important (unless the diameter of the masses is very large). The compound pendulum then demonstrates how to include these effects. For a compound pendulum, the rotational KE effects tend to be far more important than for the case of the simple pendulum.
this question might sound silly, but how can energy, for instance, potential energy be negative (if both angles are 0)?
This comes down to where you set your zero-point. In reality, the potential energy is only zero at the center of the earth, however, we can arbitrarily set a point to be zero by shifting our axes.
The truth is that we really only care about change in the potential energy rather than the absolute value. In this problem, I the axes we placed at the top hinge, so any masses below this would, in effect, have -ve potential energy. If the axes had, instead, been attached to the bottom mass, then that would be zero potential energy and all potential energies would be positive.
Your equations seems to be in miss agreement with Leonard Merovitch's (from his book Methods of Analytical Dynamics, example 2.6 page 78). The potential energy equation from his book is:
V = m1 g L1 (1-cosθ1) + m2 g [L1 (1-cosθ1) + L2 (1-cosθ2) ]
The problem seems to be the heights considered, let's find them out for Meirovitch's who they are:
V = m1 g h1 + m2 g h2 = m1 g (L1 - L1 cosθ1) + m2 g (L1 - L1 cosθ1 + L2 - L2 cosθ2),
h1 = L1-L1cosθ1, and
h2 = L1 - L1 cosθ1 + L2 - L2 cosθ2
Let's do the same for your video:
V = m1 g h1 + m2 g h2 = m1 g (-L1 cosθ1) + m2 g (-L1 cosθ1 - L2 cosθ2)
h1 = -L1 cosθ1
h2 = -L1 cosθ1 - L2 cosθ2
I see a lot of people on the internet solving the double pendulum the same way as you, I'm trying to figure out why, maybe you can explain me?
In my understanding your equation actually describes the motion for the double pendulum when it moves inside the first quadrant of cartesian coordinates when the masses are moving anti-clockwise and the initial condition is that they are aligned vertically in the positive Y, am I right?
It also seems to me that once you must differentiate the potential energy in θ1 and θ2 this difference should not matter in the end result (mathematically) whatsowever, but, in terms of physical interpretation, maybe.
I would be so grateful if you could find the time to answer these questions, I'm really struggling to find this out.
The difference here is just a matter of the coordinate system used and where you place the origin. This comes down to the question of where does the system have zero potential energy. Some might define that the point of zero potential energy is the center of the earth, others might define it as the height of a mass in its equilibrium position. In my case, I placed the origin at the hinge (whereas Meirovich places it at the mass). Shifting the location of the origin, will simply change the potential energy expression by a constant.
So the observation that you made is the correct one, namely, that for the purpose of Lagrange's Equations, the actual value of the potential energy is irrelevant. What is relevant is the DERIVATIVE of the potential energy. As a result, you should pick whichever coordinate system you find most comfortable.
Thanks so much, on the equation of the potential energy why is it -(m1 + m2) and not just -(m1)? Thank you
I showed this mathematically in going from equation 8 to equation 9. If you write out on the substitutions on a piece of paper, you'll find it's just algebra.
But one way that you can think about it physically, it was when Θ1 increases, it lifts, both m1 and m2, however, when Θ2 increases it lifts only m2.
Freeball Okay thank you 👍
Thank you.
It may seem a silly question but if one assumes theta(1) = theta (2) at all times the system then becomes a single pendulum i.e. a rigid rod but with an extra mass in the 'middle'. Would the equations of motion you have produced describe the motion of such a pendulum?
Yes, although the equations would, in effect, reduce to a single degree of freedom system.
It has been 15 years and change since I took a calc class: why does the derivative of x sub 1 include the derivative of theta sub 1? Isn't the derivative of Sin (x) just Cos (x)?
Because theta is considered a function of time. That means we have to apply the "chain rule": multiply the expression we get (in this case exactly that cos(theta sub 1) which you mentioned) by the derivative of the function inside the sine (theta sub 1)
What software are you using to make these videos????
Vincent Tarantino software is “Paper” by WeTransfer. Using an iPad Pro 13-inch and Apple Pencil.
@@Freeball99 Awesome! It looks so good! I'm a Physics teacher and I'll have to be teaching online classes and I love the way this looks so that's what I'm going to use
12:40 What does Q_i mean there. Isn't all of the lagrange equation suppose to equal 0 there?
The Q_i represent the generalized force. It is zero if there is no externally applied force/moment in the direction of a particular generalized coordinate.
@19:04 I still find in eq.19 an error in the last term, it is a minus sign (-) that precedes the last term, isn't it?
Anyway a great explanation of the exercise
Thanks for sharing
The issue is actually the line before, the sign should be a plus since we are subtracting eq. 18 both of the minus signs become a plus.
Hi, what if there is an external horizontal force at m2?
You would incorporate this on the right-hand side of the equations as a moment. If it's a tangential force, then this would only affect the 2nd equation. If it is truly a horizontal force, then it would affect both equations of motion.
equation 22 wouldn't it be negative (the 1st part partial derivative of T)
When taking the derivative with respect to θ2, we get two negatives in the first term which combine to form a positive. Applying the chain rule to cos(θ1 - θ2) gives us -sin(θ1 - θ2) · (-1) = +sin(θ1 - θ2) . So, this term should have a positive sign.
Wouldn't this calculation process be easier using polar coordinates?
Generally I find it simpler to derive pendulum problems in cartesian coordinates and it is less prone to errors. You can certainly derive it in polar coordinates. Try it and see if you can get the same results.
Hello sir; I want to ask you about how x could be l sin teta ... please answer me, because this is my task 😟
This comes from the geometry of the problem and based on the fact that θ1 is measured relative to the vertical direction. Based on the definition of the coordinate system and the location of the angle, θ1, the x1-coordinate is equal to the length of the side opposite θ1, and we already know the length of the hypotenuse (which is L1), so from trigonometry:
sin(θ1) = x1 / L1
which gives us
x1 = L1 * sin(θ1)
Why y using -cos not cos?
@@hikmahmaulidina333 Because the y-axis is defined as positive upwards, so this is in the negative y-direction.
Hi, do you know the motion equation for 3d double pendulum? that works in 3 planes, x y z, and also has the rotational angle. been searching the internet and books for it, can't find any.
big thanks if you see and respond to this comment
I've never seen it, but you could derive it!
Hi, its an amazing video. Congratulations! I would like to do how to proceed in the case that the double pendulum is attached to a car of mass m1+m2 with velocity v0 in a surface without friction.
I have a video with a pendulum on a cart (ua-cam.com/video/Fo7kuUAHj3s/v-deo.html). While it is not exactly what you're asking about, it is pretty close. Using this video and the one above, you should be able to derive the equations of motion for a double pendulum attached to a cart.
@@Freeball99 I will see. Thank you so much.
Does the derivation change when there is an external torque at the beginning of each rod?
If there is a moment applied about the first hinge point, then this will appear on the right hand side of the first equations and if there is a moment applied about the second hinge point then this will appear on the right hand side of the second equation.
Really great video! I have a question about potential energy, eqn 9. The h1 for m1 shouldn't be l1(1-cos(theta 1))? And the h2 for m2 corresponds l1(1-cos(theta 1))+l2(1-cos(theta 2))? Why use the y1 which is displacement of m1? It seems not consistent with your another video that describes the potential energy with h. Looking forward to your help. Thanks~
Good question. I purposely did it differently to prove a point...These are, in effect, the same thing. They just differs by a constant, so really it amounts to where one decided to place the the point of zero potential energy (the origin of your axes). I have assumed that the zero potential is at the hinge while your expression puts the zero potential energy location at the lowest position of the mass. The truth is that BOTH are equally valid. It turns out that we don't really care about the absolute value of the potential energy (and the location that we call zero potential energy is somewhat arbitrary - technically the point of zero potential energy is really at the center of the earth). Rather, what we care about is the DERIVATIVE of the potential energy and the derivatives are identical (because you just added a constant, l1, which disappears when you differentiate it.
@@Freeball99 I see your point, I care about the derivative of potential energy and for object m1 it's m1gl1sin(theta1)
@@Freeball99 I have been watching different videos searching for an explanation on why people use different methods for calculating potential energy. Thanks so much for the thorough explanation!:-)
Two equal masses connected to a massless rigid rod of length L forming a dumbbell rotated In X-Y
plane. Find Lagrange equation of motion for this system.
kindly solve this problem
I need more information for this. Do you have a problem statement you can post?
@@Freeball99 yes
Q_i in Lagrange's equation why did you make it equal to 0?
This is because there is no external moments being applied.
From equations 17 to 18, where does (theta 1 dot - theta 2 dot) go?
Never mind I see thanks anyway
I multiplied it out (distributed it). If you look at the 3rd and 4th terms of the following equation, you will see that they are contained there.
@@Freeball99 thanks , how would I then solve these equations?
Nice description. Can you do this in Matlab? And show simulation?
Sorry, but I no longer use MATLAB since deciding to take the plunge into Python several years ago. Much cheaper.
In the kinetic energy for m1, L1 multiplied by theta dot 1, should L1 be squared? Another thing, and if I want to find the small oscillations of this double pendulum, where should I start?
I commented without finish the video, you fixed it minutes later, my bad.
Great vid, thank you vm.
Can you please tell me what write/draw program you use?
Thank you
The app is called "Paper" by WeTransfer. Running on an iPad Pro 13 inch and using an Apple Pencil.
Kindly solve this problem by using newtonian mechanics
Will do, but I have some other videos to make first.
a question why do we assume the rods to be massless
In the case of a simple pendulum, it is a common assumption. What we are really saying is that the mass of the rod is so much less than the mass of the pendulum bob that its contribution to the kinetic and potential energies is insignificant. If we want to take the mass of the rod into account (as it grows larger), then this becomes a compound pendulum. I have some videos on compound pendulums with explain how to model those.
Great video
What happened to the (theta dot 1 - theta dot 2) from equation 17 in equation 19?
Equation 19 is correct as written. I multiplied out the (theta_dot1 - theta_dot2) and then the terms with the theta_dot2 cancel out. What remains is just the theta_dot1 which appears in eqn 19. If you write it out, it will become apparent.
Very intresting. How would the equations look like if you added friction?
Check out my video on Coulomb damping which explains how to incorporate friction in the equation of motion.
ua-cam.com/video/QUreAM7JTwk/v-deo.html
Is this solution used to make a description of the energy? since if I put that teta1 and teta2 are equal to pi / 2 and their derivatives equal to zero, it gives me that the energy of the system is zero. this does not agree with his movement
I'm not sure I understand. Where does it show that the energy of the system is equal to zero?
So the motion does not depend on the first pendulum's point mass?
Yes, the motion does depend on m1 as shown in equation 19.
correct me if I'm wrong, those two solutions form a System of two Second Order Non-Linear DE, right? and is there a next step?
There you go. ua-cam.com/video/nBBQKZb6JZk/v-deo.html Additionally, this model can be incorporated into a control's problem and then the combined system can be solved...but that's for another class.
Hi... I got a question.
In the kinetic energy there is no inertia applied? With an angular velocity? Thanks for the video
And what if I want to do an inverted double pendulum, should I change the signs of y? :)
This is due to the assumption that these are point masses so they have no rotatory inertia. For the inverted pendulum problem, take a look at this video which explains it: ua-cam.com/video/Fo7kuUAHj3s/v-deo.html - You need to be careful with just flipping your coordinate system. Fundamentally, it is the potential energy expression that will flip signs, but you need to be careful to be consistent with your definition of the positive direction of θ.
@@Freeball99 Thanks for the explanaiton.
The thing is that I need to do like a human spine and I was looking for a mathematical model or at least an example, because it feels so difficult to do a 3D model, don't know if you have any idea... And sorry for bothering you.
Can you make a python program of visualizing the path traced by the 2nd bob of the pendulum?
Yes, good idea. There you go. Here is part 1. The other parts will be out within a week or so. ua-cam.com/video/nBBQKZb6JZk/v-deo.html
@@Freeball99 thank you😊
@@Freeball99 THANK YOUU
Hey, how would one rearrange these so they can be used for a numerical solution? It’s my first time with lagrangians.
Edit:
By that I mean, is it possible to separate out it to
thetaDoubleDot = (something including theta and probably thetaDot)
since I’d know how to use that for a numerical solution then.
errrrrrr differential equ u solve after that
basically you have a system of 2 second order differential equations and you just solve them which is massively painful because....well, just try it :D
It is shown here: ua-cam.com/video/nBBQKZb6JZk/v-deo.html
Thanks sir 😍😍😍
equation 17 was derivation of theta 1 w.r.t T ... why did not consider theta 2 constant
This is because θ2 is a function of t. If we differentiate w.r.t. θ1, then we would treat θ2 as a constant, HOWEVER, when we differentiate w.r.t. t, then we are take the so-called "total derivative" - i.e. it is not a partial derivative.
Wonderful work sir, very much appreciate it!
In equation 15; why did you write Qi in right hand side of the equation? Shouldn't it be 0 instead?
This is just the general form of Lagrange's Equations. In this particular case, yes, it is equal to zero.
@@Freeball99 What does the Q_i mean in the general equation?
@@michaelwang1730 The Qi's are the generalize forces (ie forces or moments) associated with the ith coordinate. These are simply the forces/moments that are applied directly to the particular coordinate in question.
Can you explain why we get (m1+m2) when pluging in equations 2,4 into 9?
It's just some algebra. Substitute the 2, 4 into 9, then expand it all and then simplify. If your write it out, you'll see it immediately.
would it be much different using radial (a.k.a. polar) coordinate system where the only coordinate known is r (or in this case l1 or l2) and the angle (in this case theta)? Does it only involve skipping the step of converting into cartesian coordinates or is there something more?
You could model this directly in polar coordinates if you prefer. However, from my experience, in most case where you're dealing with pendulums and gravitational effects, it tends to be easier to define your kinematics in cartesian coordinates.
@@Freeball99 weird, I've only been taught the polar method. I found it difficult transforming between the two. I still prefer the polar, due to movement being predominantly circular. Thanks for your reply
What about the terms Qi?
In this problem, the Qi's are 0 because there are no externally applied forces or moments.
I’m watching this with no clue what your saying because I was curious if predicting a double pendulum was possible
The math makes no sense to me but it’s still interesting to listen to
Yes it is. Despite the fact that the motion of a double pendulum appears to be chaotic, it is in fact able to be described very accurately up to whatever degree of precision you prefer PROVIDED THAT you know the initial conditions - ie the initial angle of each mass when the system is set into motion.
@@Freeball99 And provided you are in special physics land with no outside forces, friction, etc.
it didn't make sense how old were u when u watched this shi?? 💀
What is the app/software you use to do these slides?
The app is called "Paper" by WeTransfer. Running on an iPad Pro 13 inch and using an Apple Pencil.
Hello sir, quick question for you. If you had an external moment applied to either m1 or m2, how would you factor that into the lagrangian?
According to Lagrange's Equations, the generalized forces, Q_i appear on the right hand side of the equation. So in the case of a moment applied to mass 1, this would appear on the right hand side of equation 1. For a moment on mass 2, this would appear on the right hand side of equation 2 - this includes both conservative and non-conservative forces/moments.
@@Freeball99 yeah, and i if i am not wrong on the right hand side we only consider the non conservative forces because the delta W
(work done) should be of non conservative forces. plss correct me if i am wrong as at this part i am confused. i get confused on what to put when we come to RHS of Lagrange's Equation
@@nihargandhi3740 Any non-conservative forces should appear on the right-hand side. Additionally, if you have conservative forces, you can EITHER add these on the right-hand side as work OR can be included on the left-hand side as part of the system potential which is just the negative of the external work produced by the conservative force (V = -We).
@@Andy-hy8px ohhh yeah I get it. Thanks for the explanation 👍
so, i am not sure weather or not anyone can help me with this, i am working on an assignment in python, and we have been asked to use Euler method to predict the oscillation of a simple pendulum. this i have done, and this is very much thanks to your other video on that subject. the problem now that i have though is, the second part of the assignment is to extend the solution to a new pendulum. the new pendulum though is just the same as the old pendulum but with a joint in the rod. so that it looks very much like a double pendulum. but there is no mass at that new middle point, and that is what is making me feel uneasy. i dont think i know what the best way to proceed would be, does this Lagrange method support a mass of 0 for one of the pendulum balls? or would it be easier/even possible for me to just modify the code i already have for the euler method of a simple pendulum with a new element? any advice would be appreciated
also, another weird thing is, it specifically asks that i derive the equations of motion in terms of theta1 and theta2, these being the angles of rotation of the two joints, instead of in terms of the x,y cords of the two points, which is yet more confusing to me
Do you have a figure that you can post using Dropbox or similar?
Hello good person! I came here to learn, and noticed that you are using an amazing drawing program that I would like to know more about; if you don't mind! :D
P.S.: Good video by the way!
Odai Jabari I’m using an app called “Paper” by WeTransfer. Running on an iPad Pro 13 inch and using an Apple Pencil.
@@Freeball99 Thank you, awesome man! :D
A question: how are these equations solved? Is there any numerical algorithm?
There you go, I solved it in this video: ua-cam.com/video/nBBQKZb6JZk/v-deo.html
@@Freeball99 comm si fort, ti amo