Mapping the 3D World to an Image - 5 Minutes with Cyrill

Вставка
- Опубліковано 15 чер 2024
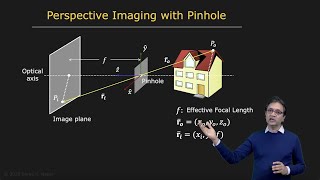
- Mapping 3D points to 2D pixel locations explained in 5 minutes
Series: 5 Minutes with Cyrill
Cyrill Stachniss, 2021
Credits:
Video by Cyrill Stachniss
Special thanks to Olga Vysotska and Igor Bogoslavskyi
Pinhole camera model image courtesy Anton@Wikipedia
Intro music by The Brothers Records - Наука та технологія








Remarkable how a complicated process can be covered so clearly and concisely in just 5 minutes!!
Your videos have been the best tool to clear my computer vision concepts. Thank you so much :) !!
Excellent. I feel much more comfortable with the concept, and have the correct terminology for further study.
Thanks! I really appreciate your lectures.
Thank you very much, I loved it!
Fast and informative. Thank you so much
thanks for the clear explanation !
Very Useful! thank you
Thank you. it was indeed useful. 🙇♂️
Thank you !!
Very nice. 🙏
Thank you so much for this amazing content.Would you like to make a video about visual odometry using single camera?
Thank you. Could you talk about what are the common feature extractors and descriptors for 3D point cloud (with and without RGB)?
0:51 1:16 4 coordinate systems 1:56 camera location 3:48 formula interpretation 4:06 not invertible b/c info loss from 3D to 2D (given a 3D point, we can use the calculated P to get the corresponding 2D point, but given a 2D point, we cannot use P to get the corresponding 3D point b/c loss of info) 4:44 can partially invert with a 1D solution space 4:51 5:07 5:13
decent explain, thx
I have a question, maybe you can give me a hint how I have to continue. I use a camera and can detect my aruco marker. The camera is calibrated and I have the camera matrix (intrinsics), distortion coefficients and the rotation & translation vector (extrinsic). And by the aruco functions I can detect the center of my aruco marker in the given image. But HOW can I caluclate the x,y coordinates of the marker in real world coordinates by the given parameters??? I dont get it :D I want to now when I make pic1, than move the marker, do pic2, I want to know how many mm in the real world the aruco marker moved in the x-y layer. And the distance to the object is not constant. But I do not want to know the distance. I just want to get accurate x,y coordinates. Thanks for your great video collection by the way!
Please make a video on Feedback Particle filter
Tanks sir from an architect.
We have our “senzor” 😁 Cute 🙂
🤫