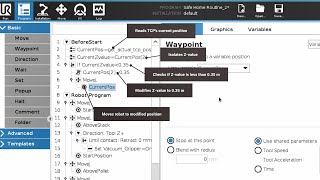
How to align the active TCP to a feature

Вставка
- Опубліковано 20 жов 2024
- How to align the active TCP to a feature
To learn more about features, visit academy.univer...
Want to learn how to program our robots? Sign up for our free, interactive online training: academy.univer...
Sign up for in-class training at one of our more than 50 Authorized Training Centres located across the globe: academy.univer...








Hello, has the 10e something like a U-Frame Function from Fanuc robots? It would be really helpful. Thanks!!
Hello Ivan. Yes it has - on UR robots, frames/coordinate systems are called features. If you are interested in learning how to program UR robots, you can use our free e-learning courses (there's also a module on working with features/frames) academy.universal-robots.com/free-e-learning/e-series-e-learning/
@@UniversalRobotsAcademy thank you for your answer. I will begin today with the module: e-Series pro track. Thanks
My company bought a UR10e, how can we align ourselves (automatically) against a table that is always at a different tilt? Is there a script or function that allows me to modify my pre-set plans after running my program?
Hello Noe. You need to set the feature (plane) variable to make all MoveJ/MoveL to be related to the feature/plane variable - whenever you change the variable value the plane is changed and the waypoints are moved.
Can this be done using a script command or during program execution?
Yes, it can be done during program execution. You need to set the feature (plane) variable to make all MoveJ/MoveL to be related to the feature/plane variable - whenever you change the variable value the plane is changed and the waypoints are moved.
How do I call the "align" command from script/ using program nodes?
There is no align script command. Just by changing the feature/plane the waypoints are shifted already. You just need to call on the MoveJ or MoveL tab the new feature/plane and the waypoints will be aligned automatically.