Motion-prior Contrast Maximization for Dense Continuous-Time Motion Estimation (ECCV 2024)

Вставка
- Опубліковано 18 вер 2024
- Project page: github.com/tub...
PDF: arxiv.org/pdf/...
Dataset (20GB): drive.google.c...
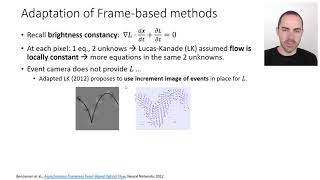
Current optical flow and point-tracking methods rely heavily on synthetic datasets. Event cameras are novel vision sensors with advantages in challenging visual conditions, but state-of-the-art frame-based methods cannot be easily adapted to event data due to the limitations of current event simulators. We introduce a novel self-supervised loss combining the Contrast Maximization framework with a non-linear motion prior in the form of pixel-level trajectories and propose an efficient solution to solve the high-dimensional assignment problem between non-linear trajectories and events. Their effectiveness is demonstrated in two scenarios: In dense continuous-time motion estimation, our method improves the zero-shot performance of a synthetically trained model on the real-world dataset EVIMO2 by 29%. In optical flow estimation, our method elevates a simple UNet to achieve state-of-the-art performance among self-supervised methods on the DSEC optical flow benchmark.
Reference:
F. Hamann, Z. Wang, I. Asmanis, K. Chaney, G. Gallego, K. Daniilidis,
Motion-prior Contrast Maximization for Dense Continuous-Time Motion Estimation,
European Conference on Computer Vision (ECCV), 2024.
Affiliations:
Technical University of Berlin (Berlin, Germany),
University of Pennsylvania (PA, USA),
Robotics Institute Germany (RIG), www.robotics-i...
Science of Intelligence Excellence Cluster (Berlin, Germany), www.scienceofi...
Einstein Center Digital Future (Berlin, Germany), www.digital-fu...
Event-based Vision:
- Research: sites.google.c...
- Survey paper: arxiv.org/abs/...
- Course at TU Berlin: sites.google.c... - Наука та технологія

![[04] Motion Forecasting (Waabi CVPR 24 Tutorial on Self-Driving Cars)](http://i.ytimg.com/vi/Nt_-6P8EVZ4/mqdefault.jpg)