Indoor navigation flight test using FAST-LIO with Ouster LiDAR (OS0-32)

Вставка
- Опубліковано 20 вер 2024
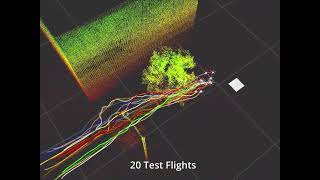
- This video is the indoor navigation flight test.
The sensor on the drone specified OS0-32 (max range 50m, V-FOV 90deg)
FAST-LIO is implemented in this simulation and used OS0-32 and px4 IMU.
GAZEBO world is the Bayland which is default one in the current px4 autopilot.
SLAM pose is used to update a PX4 autopilot's local position estimate.
The result odometry is quite accurate that makes the velocity control works well.
github
FAST-LIO : github.com/hku...
PX4 autopilot : github.com/PX4...








Cool. Do you use Ouster python SDK?
No, I just modified velodyne plugin to fit the ouster spec. Thanks for interest :)
Could you plz share the demo's repository?
Sorry, this project is just a test using open source from SLAM, PX4, etc. If you need any help, let me know specifically through lee2000zxc@gmail.com. Thank you for your interest :)