It balances by cyclic presession ? it drops the disk to balance. thats beautiful. I built some self balancers 13 yrs ago , its a joy to behold when it can overcome gravity.
Nice work!! I am really fascinated by gyros too. I am going to attempt this with a brushless torque motor and encoder. Also I will invest in a dynamic balancer.
@@demej00 yes, I have downloaded the booklet. Thank you. I think I have the possibility to build real gyrocar now. I can just buy a used motorbike, stretch it and put a big gyro on it. Let see if I can do that. BTW, can you tell me more about your high quality, low friction potentiometer?
I wondered why my single gyroscope vehicle turns right just fine but falls over on sharp left turn. I believe it is because on a left turn, if I turn the vehicle sharply and quickly, I exceed the rate of precession to the left (my gyro is spinning to the left) and the rotor becomes unstable. But if I turn slowly, there is no problem as I do not exceed the rate of precession. I guess the only solution is to turn the entire gyroscope to the left when the vehicle is turned left.
Nicely done! I'm in the process of making a gyro rail as well! I was inspired by Eric Laithwaite's lectures. I've build a steady gyro in a pretty decent frame. I'm at the stage where I have to make the servo and feedback. I was wondering though, would it be possible to build the servo circuit without a microcontroller unit? Some active control circuit using an IC or something like that.. I haven't understood the logic involved, is it like a linear response or does the servo need more speed if the disturbance is high? If it is simply a feedback where there is a tilt to one side, the servo has to simply work in fixed impulses to bring the vehicle upright; Is this correct or is it more complicated than that? Thank you..!
Take a look at the the book in the description by Mori - he does not use a micro controller. It is very detailed and applies to trains. Good luck and let me know how it turns out.
You can find a cheaper pot probably. It should be a non-contact variety as they do not give false readings and are not so prone to vibration. Non-contact have an internal hall-effect sensor and a magnet. I tried cheap pots, they do not work well at all.
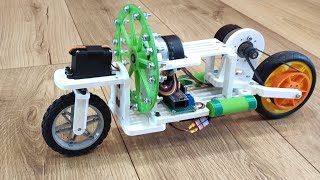
one quick question. did you. make that wheel yourself or bough from somewhere else? If you bought it , from where?? And which motor do you use to make gyro??
Hi Tirth. I had a machinest make it. It only cost about $30 here in china but I had one made in the US and it cost about $100. So no you can't buy one but my friend Okki bought one of these: www.bengs-modellbau.de/material/schwungraeder/gussschwungrad-140mm from Germany, might be an option for you. Or perhaps you could source one from the US. It is a model steam engine flywheel and they have different sizes - looks perfect. Regardless, it must be vibration free or you will have problems. Please check out my Part 3 where I have this gyro mobile now and more to come. Any questions always welcome. Be sure you check out the booklet I mentioned in the description by Mori Hiroshi - invaluable!
The motor is a Mabuchi 550 12 volt 18000 rpm (no load) motor. You could probably get away with a 390 or 540 sized motor as long as it is rated higher than 10000 rpm. Also depends on how heavy your rotor is. My aluminum rotor weighs 360 grams. Your rotor weight to the weight of the entire vehicle ratio has to be from 10 to 30 % for it to balance - generally speaking. My ratio is 20%.
And I have read that documentation that you linked with your video. And here I got to know that I can even set the rotor vertically. So, just wanna ask you have you ever tried it? And should I try this or will I face some problems in it??
@@tirthpatel3564 I did one vertical axis setup and it worked but it had no active controls, just a gyro on two chopsticks. I see that Mori Hiroshi started using vertical axis gyros but then his final gyros were all horizontal axis. The C1 motorcycle from Lit Motors used horizontal axis. So it seems that is the way to go from what others have been doing. You could try it though - you would be breaking new ground. But we know that the horizontal axis gyro works for sure.
Not sure I understand but it weighs 2 kilograms, the gyro wheel weighs 365 grams and rotates at 4000 to 8000 rpm. It is about 20cm wide by 30cm long by 25cm high.









It balances by cyclic presession ? it drops the disk to balance. thats beautiful. I built some self balancers 13 yrs ago , its a joy to behold when it can overcome gravity.
Thats fantastic! Would love to see any photos or videos of yours. So few out there.
Nice work!! I am really fascinated by gyros too. I am going to attempt this with a brushless torque motor and encoder. Also I will invest in a dynamic balancer.
Very nice Jimmy!
Thanks Okki. Good luck on your new business.
@@demej00 thanks Jimmy!
I didn't know that you mentioned my name on this video.. I should thank you, not you me.
@@OkkiMoeljadi Your gyrocar motivated me to keep working on mine. Be sure to check out Hiroshi's booklet - very informative.
@@demej00 yes, I have downloaded the booklet. Thank you. I think I have the possibility to build real gyrocar now. I can just buy a used motorbike, stretch it and put a big gyro on it. Let see if I can do that. BTW, can you tell me more about your high quality, low friction potentiometer?
Congratulation !
Thanks to you. I couldn't figure out how to make the servo motor work until I saw your documentation.
By the way, my ratio of rotor weight to vehicle weight is 358g / 1800g at 4000 rpm or 19.9%
I wondered why my single gyroscope vehicle turns right just fine but falls over on sharp left turn. I believe it is because on a left turn, if I turn the vehicle sharply and quickly, I exceed the rate of precession to the left (my gyro is spinning to the left) and the rotor becomes unstable. But if I turn slowly, there is no problem as I do not exceed the rate of precession. I guess the only solution is to turn the entire gyroscope to the left when the vehicle is turned left.
Nicely done! I'm in the process of making a gyro rail as well! I was inspired by Eric Laithwaite's lectures. I've build a steady gyro in a pretty decent frame. I'm at the stage where I have to make the servo and feedback. I was wondering though, would it be possible to build the servo circuit without a microcontroller unit? Some active control circuit using an IC or something like that.. I haven't understood the logic involved, is it like a linear response or does the servo need more speed if the disturbance is high? If it is simply a feedback where there is a tilt to one side, the servo has to simply work in fixed impulses to bring the vehicle upright; Is this correct or is it more complicated than that? Thank you..!
Take a look at the the book in the description by Mori - he does not use a micro controller. It is very detailed and applies to trains. Good luck and let me know how it turns out.
Can I get this model
can please tell me more about the potentiometer, or please provide me buying link.
www.amazon.com/Effect-Potentiometer-Encoder-Sensor-Degree/dp/B07SXFBN5D
or similar.
Thanks a lot, your work is awesome, I'm following your tutorial.
@@TechMechRobo Thank you. It was an exciting and rewarding project. Hated to see my part end. Hope others make it better.
You can find a cheaper pot probably. It should be a non-contact variety as they do not give false readings and are not so prone to vibration. Non-contact have an internal hall-effect sensor and a magnet. I tried cheap pots, they do not work well at all.
one quick question. did you. make that wheel yourself or bough from somewhere else?
If you bought it , from where??
And which motor do you use to make gyro??
Hi Tirth. I had a machinest make it. It only cost about $30 here in china but I had one made in the US and it cost about $100. So no you can't buy one but my friend Okki bought one of these: www.bengs-modellbau.de/material/schwungraeder/gussschwungrad-140mm
from Germany, might be an option for you. Or perhaps you could source one from the US. It is a model steam engine flywheel and they have different sizes - looks perfect. Regardless, it must be vibration free or you will have problems. Please check out my Part 3 where I have this gyro mobile now and more to come. Any questions always welcome. Be sure you check out the booklet I mentioned in the description by Mori Hiroshi - invaluable!
The motor is a Mabuchi 550 12 volt 18000 rpm (no load) motor. You could probably get away with a 390 or 540 sized motor as long as it is rated higher than 10000 rpm. Also depends on how heavy your rotor is. My aluminum rotor weighs 360 grams. Your rotor weight to the weight of the entire vehicle ratio has to be from 10 to 30 % for it to balance - generally speaking. My ratio is 20%.
Thank you very much and kudos to your work 👍
And I have read that documentation that you linked with your video. And here I got to know that I can even set the rotor vertically. So, just wanna ask you have you ever tried it? And should I try this or will I face some problems in it??
@@tirthpatel3564 I did one vertical axis setup and it worked but it had no active controls, just a gyro on two chopsticks. I see that Mori Hiroshi started using vertical axis gyros but then his final gyros were all horizontal axis. The C1 motorcycle from Lit Motors used horizontal axis. So it seems that is the way to go from what others have been doing. You could try it though - you would be breaking new ground. But we know that the horizontal axis gyro works for sure.
Mare pan aavu banavu che
Aa wheel nu weight and dimension su che
Not sure I understand but it weighs 2 kilograms, the gyro wheel weighs 365 grams and rotates at 4000 to 8000 rpm. It is about 20cm wide by 30cm long by 25cm high.
Free pdf download on gyro on my website: demej00.wordpress.com/2020/02/08/self-balancing-gyroscope-two-wheeler/