Розмір відео: 1280 X 720853 X 480640 X 360
Показувати елементи керування програвачем
Автоматичне відтворення
Автоповтор
at 6:26, "" In this config. the arm can apply large forces up and to the right, at point D but smaller at left "" ??? How D is near to Joints ?
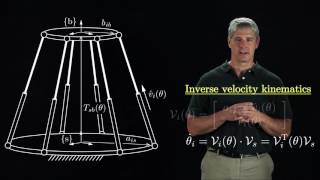
At 1:01 what is the meaning of dropping the dependence on time? How the differential equation became partial differentiation?
my limited understanding is that we are rewriting df/dt = df/dθ * dθ/dt. df/dθ is represented by the jacobian in the video, while dθ/dt is represented by theta dot.
Great video for finals review
good good
good









at 6:26, "" In this config. the arm can apply large forces up and to the right, at point D but smaller at left "" ??? How D is near to Joints ?
At 1:01 what is the meaning of dropping the dependence on time? How the differential equation became partial differentiation?
my limited understanding is that we are rewriting df/dt = df/dθ * dθ/dt. df/dθ is represented by the jacobian in the video, while dθ/dt is represented by theta dot.
Great video for finals review
good good
good